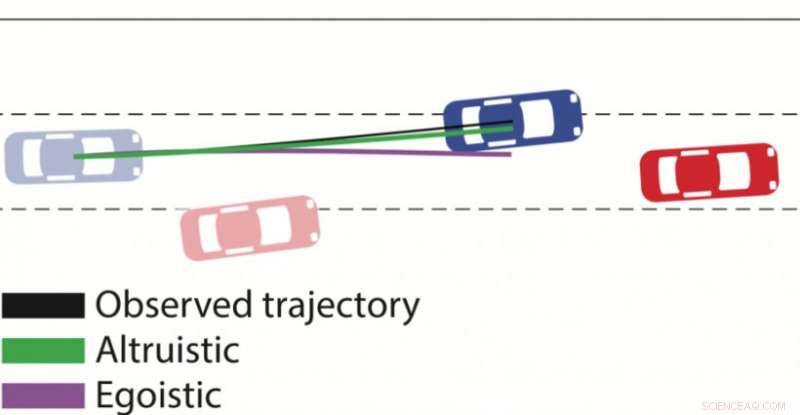
Negli scenari di unione delle corsie, un sistema sviluppato al MIT potrebbe distinguere tra comportamento di guida altruistico ed egoistico. Credito:Massachusetts Institute of Technology
Arrivano le auto a guida autonoma. Ma nonostante tutti i loro sensori fantasiosi e le intricate capacità di elaborazione dei dati, anche alle auto più all'avanguardia manca qualcosa che ha (quasi) ogni sedicenne con patentino:la consapevolezza sociale.
Mentre le tecnologie autonome sono migliorate sostanzialmente, alla fine vedono ancora i conducenti intorno a loro come ostacoli fatti di uno e zero, piuttosto che esseri umani con intenzioni specifiche, motivazioni, e personalità.
Ma recentemente un team guidato da ricercatori del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT ha studiato se le auto a guida autonoma possono essere programmate per classificare le personalità sociali di altri conducenti, in modo che possano prevedere meglio cosa faranno le diverse auto e, perciò, essere in grado di guidare in modo più sicuro tra di loro.
In un nuovo documento, gli scienziati hanno integrato strumenti della psicologia sociale per classificare il comportamento di guida rispetto a quanto è egoista o disinteressato un determinato guidatore.
Nello specifico, hanno usato qualcosa chiamato orientamento al valore sociale (SVO), che rappresenta il grado in cui qualcuno è egoista ("egoista") rispetto a altruista o cooperativo ("prosociale"). Il sistema quindi stima gli SVO dei conducenti per creare traiettorie di guida in tempo reale per le auto a guida autonoma.
Testare il loro algoritmo sui compiti di unire le corsie e fare svolte a sinistra non protette, il team ha dimostrato di poter prevedere meglio il comportamento di altre auto di un fattore del 25%. Per esempio, nelle simulazioni di svolta a sinistra la loro macchina sapeva aspettare quando l'auto in avvicinamento aveva un guidatore più egoista, e per poi girare quando l'altra macchina era più prosociale.
Sebbene non sia ancora abbastanza robusto per essere implementato su strade reali, il sistema potrebbe avere alcuni casi d'uso intriganti, e non solo per le auto che si guidano da sole. Supponiamo che tu sia un essere umano che guida e un'auto entra improvvisamente nel tuo punto cieco:il sistema potrebbe darti un avviso nello specchietto retrovisore che l'auto ha un guidatore aggressivo, permettendoti di adattarti di conseguenza. Potrebbe anche consentire alle auto a guida autonoma di imparare effettivamente a esibire un comportamento più simile a quello umano che sarà più facile da capire per i conducenti umani.
"Lavorare con e intorno agli umani significa capire le loro intenzioni per capire meglio il loro comportamento, " dice lo studente laureato Wilko Schwarting, chi è stato l'autore principale del nuovo articolo che sarà pubblicato questa settimana nell'ultimo numero di Atti dell'Accademia Nazionale delle Scienze . "Le tendenze delle persone a essere collaborative o competitive spesso si ripercuotono sul modo in cui si comportano come conducenti. In questo documento, abbiamo cercato di capire se questo fosse qualcosa che potevamo effettivamente quantificare".
I coautori di Schwarting includono i professori del MIT Sertac Karaman e Daniela Rus, così come la ricercatrice Alyssa Pierson e l'ex postdoc CSAIL Javier Alonso-Mora.
Un problema centrale con le auto a guida autonoma di oggi è che sono programmate per presumere che tutti gli esseri umani agiscano allo stesso modo. Ciò significa che, tra l'altro, sono piuttosto conservatori nel loro processo decisionale alle fermate a quattro vie e ad altri incroci.
Sebbene questa cautela riduca la possibilità di incidenti mortali, crea anche colli di bottiglia che possono essere frustranti per gli altri conducenti, per non dire difficili da capire per loro. (Questo potrebbe essere il motivo per cui la maggior parte degli incidenti stradali ha comportato il tamponamento da parte di conducenti impazienti.)
"Creare un comportamento più simile all'uomo nei veicoli autonomi (AV) è fondamentale per la sicurezza dei passeggeri e dei veicoli circostanti, poiché comportarsi in modo prevedibile consente agli esseri umani di comprendere e rispondere in modo appropriato alle azioni dell'AV, "dice Schwarting.
Per cercare di espandere la consapevolezza sociale dell'auto, il team CSAIL ha combinato metodi della psicologia sociale con la teoria dei giochi, un quadro teorico per concepire situazioni sociali tra attori in competizione.
Il team ha modellato scenari stradali in cui ogni guidatore ha cercato di massimizzare la propria utilità e ha analizzato le sue "migliori risposte" date le decisioni di tutti gli altri agenti. Basandomi su quel piccolo frammento di movimento di altre auto, l'algoritmo del team potrebbe quindi prevedere il comportamento delle auto circostanti come cooperativo, altruista, o egoistico, raggruppando i primi due come "prosociali". I punteggi delle persone per queste qualità si basano su un continuum rispetto a quanto una persona dimostra cura per se stessa rispetto alla cura per gli altri.
Negli scenari di fusione e svolta a sinistra, le due opzioni di risultato erano lasciare che qualcuno si unisse alla tua corsia ("prosociale") o meno ("egoista"). I risultati del team hanno mostrato che, non sorprendentemente, le auto che si fondono sono considerate più competitive delle auto che non si fondono.
Il sistema è stato addestrato per cercare di capire meglio quando è opportuno esibire comportamenti diversi. Per esempio, anche il più deferente dei conducenti umani sa che certi tipi di azioni, come cambiare corsia nel traffico intenso, richiedono un momento di maggiore determinazione e determinazione.
Per la fase successiva della ricerca, il team prevede di lavorare per applicare il proprio modello ai pedoni, biciclette, e altri agenti negli ambienti di guida. Inoltre, indagheranno su altri sistemi robotici che agiscono tra gli umani, come i robot domestici, e integrando SVO nei loro algoritmi di previsione e decisionali. Pierson afferma che la capacità di stimare le distribuzioni SVO direttamente dal movimento osservato, invece che in condizioni di laboratorio, sarà importante per campi ben oltre la guida autonoma.
"Modellando le personalità di guida e incorporando i modelli matematicamente utilizzando l'SVO nel modulo decisionale di un'auto robotica, questo lavoro apre le porte a una condivisione della strada più sicura e senza interruzioni tra le auto guidate dall'uomo e quelle guidate da robot, "dice Rus.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.