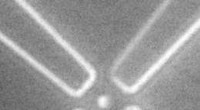
Figura che mostra la strategia per il rilevamento tattile basato sulla visione introdotta dai ricercatori. Crediti:Sferrazza, et al., ieeexplore.ieee.org/document/8918082
Per interagire efficacemente con l'ambiente circostante, i robot dovrebbero essere in grado di identificare le caratteristiche di oggetti diversi semplicemente toccandoli, come fanno gli umani. Ciò consentirebbe loro di ottenere e gestire gli oggetti in modo più efficiente, utilizzando il feedback raccolto dai sensori per regolare le loro strategie di presa e manipolazione.
Con questo in testa, gruppi di ricerca di tutto il mondo hanno cercato di sviluppare tecniche che potessero dare ai robot il senso del tatto analizzando i dati raccolti dai sensori, molti dei quali si basano sull'utilizzo di architetture di deep learning. Mentre alcuni di questi metodi sono promettenti, in genere richiedono grandi quantità di dati di addestramento e non sempre generalizzano bene su oggetti precedentemente invisibili.
I ricercatori dell'ETH di Zurigo hanno recentemente introdotto una nuova strategia basata sul deep learning che potrebbe consentire il rilevamento tattile nei robot senza richiedere grandi quantità di dati del mondo reale. Il loro approccio, delineato in un documento pre-pubblicato su arXiv, comporta l'addestramento di reti neurali profonde interamente su dati di simulazione.
"La nostra tecnica apprende dai dati come prevedere la distribuzione delle forze esercitate da un oggetto a contatto con la superficie di rilevamento, " Carlo Sferrazza, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Finora, questi dati (nell'ordine di decine di migliaia di punti dati) dovevano essere raccolti in un setup sperimentale per diverse ore, che era costoso in termini di tempo e attrezzature. In questo lavoro, abbiamo generato i nostri dati interamente in simulazione, mantenendo un'elevata precisione di rilevamento durante l'implementazione della nostra tecnica nel mondo reale."
Nei loro esperimenti, Sferrazza e i suoi colleghi hanno utilizzato un sensore da loro costruito con componenti semplici ed economici. Questo sensore è composto da una fotocamera standard posta sotto un materiale morbido, che contiene una diffusione casuale di minuscole particelle di plastica.
Quando una forza viene applicata alla sua superficie, il materiale morbido si deforma e fa muovere le particelle di plastica. Questo movimento viene quindi catturato dalla fotocamera del sensore e registrato.
"Sfruttiamo i modelli di immagine creati dalle particelle in movimento per estrarre informazioni sulle forze che causano la deformazione del materiale, " Sferrazza ha spiegato. "Incorporando densamente le particelle nel materiale possiamo ottenere una risoluzione estremamente elevata. Poiché adottiamo un approccio basato sui dati per risolvere questo compito, possiamo superare la complessità della modellazione del contatto con materiali morbidi e stimare la distribuzione di queste forze con elevata precisione."
Essenzialmente, i ricercatori hanno creato modelli del materiale morbido del sensore e della proiezione della telecamera utilizzando metodi computazionali all'avanguardia. Hanno quindi utilizzato questi modelli in simulazioni, per creare un set di dati di 13, 448 immagini sintetiche ideali per l'addestramento di algoritmi di rilevamento tattile. Il fatto che siano stati in grado di generare dati di addestramento per il loro modello di rilevamento tattile nelle simulazioni è molto vantaggioso, in quanto impediva loro di raccogliere e annotare dati nel mondo reale.
"Abbiamo anche sviluppato una tecnica di apprendimento del trasferimento che ci consente di utilizzare lo stesso modello su più istanze dei sensori tattili che produciamo nel mondo reale, senza bisogno di dati aggiuntivi, " ha detto Sferrazza. "Ciò significa che ogni sensore diventa più economico da produrre, in quanto non richiedono ulteriori sforzi di calibrazione."
I ricercatori hanno utilizzato il set di dati sintetici che hanno creato per addestrare un'architettura di rete neurale per applicazioni di rilevamento tattile basate sulla visione e quindi hanno valutato le sue prestazioni in una serie di test. La rete neurale ha ottenuto risultati notevoli, fare previsioni di rilevamento accurate su dati reali, anche se è stato addestrato su simulazioni.
"L'architettura di rete neurale su misura che abbiamo addestrato mostra anche possibilità di generalizzazione molto promettenti per l'uso in altre situazioni, quando applicato a dati molto diversi da quelli utilizzati nelle nostre simulazioni, per esempio., per la stima del contatto con oggetti singoli o multipli di forme arbitrarie, " Disse Sferrazza.
Nel futuro, l'architettura di deep learning sviluppata da Sferrazza e dai suoi colleghi potrebbe fornire ai robot un senso del tatto artificiale, potenziando potenzialmente le loro capacità di presa e manipolazione. Inoltre, il set di dati sintetico che hanno compilato potrebbe essere utilizzato per addestrare altri modelli per il rilevamento tattile o potrebbe ispirare la creazione di nuovi set di dati basati sulla simulazione.
"Ora vogliamo valutare i nostri algoritmi in compiti che implicano interazioni molto generali con oggetti complessi, e stiamo anche lavorando per migliorarne la precisione, " ha detto Sferrazza. "Pensiamo che questa tecnica mostrerà i suoi vantaggi quando applicata a compiti robotici del mondo reale, come le applicazioni che comportano la manipolazione fine di oggetti fragili, come un bicchiere o un uovo."
© 2020 Scienza X Rete