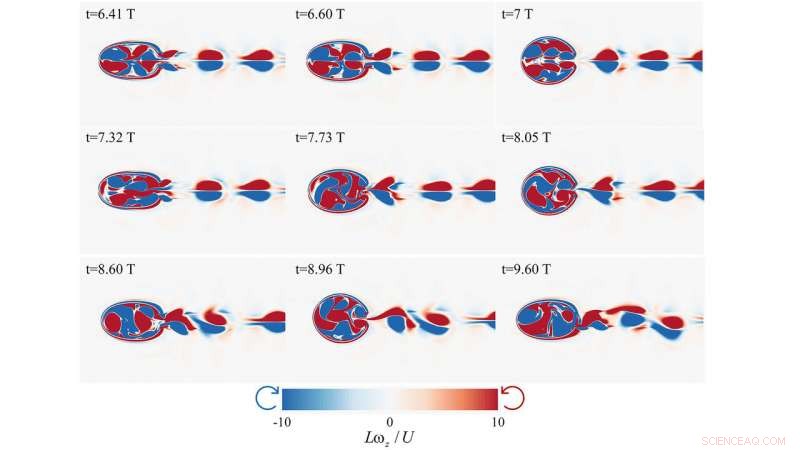
Sviluppo del modello di vorticità nell'instabilità di rottura della simmetria. Credito:Yang Luo
I calamari e altri cefalopodi utilizzano una forma di propulsione a getto che non è ben compresa, soprattutto quando si tratta della loro idrodinamica in condizioni di flusso turbolento. Scoprire i loro segreti può aiutare a creare nuovi progetti per robot e veicoli sottomarini bioispirati che devono operare in questo ambiente.
Ricercatori in Scozia, gli Stati Uniti., e la Cina stanno esplorando il meccanismo fondamentale alla base della propulsione a getto pulsato dei calamari. In Fisica dei fluidi , il gruppo descrive il loro studio numerico della propulsione a getto di cefalopodi con flusso turbolento considerato per la prima volta. Tra le loro scoperte, hanno scoperto che la produzione di spinta e l'efficienza sono sottostimate all'interno di laminare, o non turbolento, flussi.
Il modello per questa ricerca è un nuotatore bidimensionale simile a un calamaro che ha un mantello flessibile con una camera a pressione e un ugello che funge da ingresso e uscita dell'acqua. Una forza esterna, che imita la costrizione del muscolo del calamaro, viene applicato sulla superficie del mantello flessibile del modello.
"Di conseguenza, il volume interno del corpo diminuisce e l'acqua all'interno della camera viene espulsa per formare un flusso a getto, " disse Yang Luo, uno degli autori e assistente di ricerca presso l'Università di Strathclyde a Glasgow, Scozia. "Il calamaro è spinto in avanti dal forte getto nella direzione opposta, quindi il mantello si gonfia automaticamente a causa dell'energia elastica immagazzinata. Durante l'inflazione del mantello, l'acqua viene aspirata nella camera e viene espulsa durante il successivo sgonfiaggio del mantello."
La propulsione a getto può essere più efficiente se si considera il flusso turbolento, secondo Luo. Il gruppo ha anche scoperto l'instabilità dei vortici che rompono la simmetria intorno al jetter, che emette getti d'acqua, dopo diversi cicli di getto continuo.
"Questo può aiutare a fornire una migliore comprensione del motivo per cui il nuoto a raffica è utilizzato da calamari giovani e adulti che operano all'interno di flussi turbolenti più frequentemente rispetto ai piccoli di calamari che operano all'interno di flussi laminari, " disse Luo.
Oltre la propulsione a getto, i calamari giovani e adulti si affidano anche all'oscillazione delle pinne sulla testa per nuotare abbastanza spesso. Il gruppo ha scoperto che questo stile burst-and-coast può aiutare i calamari a evitare l'instabilità che rompe la simmetria del vortice di flusso circostante che potrebbe causare il deterioramento della spinta e dell'efficienza.
"I risultati del nostro lavoro sul meccanismo dell'instabilità che rompe la simmetria forniscono una guida per la progettazione di robot e veicoli subacquei ispirati ai calamari, " disse Luo. "La propulsione a getto continua potrebbe non essere favorevole, e sono necessarie misure specifiche per mitigare l'effetto di questa instabilità durante la progettazione di veicoli o propulsori sottomarini ispirati alla propulsione a getto attraverso il controllo attivo della deformazione del corpo per modificare l'evoluzione del modello di vortici interni".
Vedremo presto nuovi sottomarini a propulsione a getto?
"È difficile stabilire a questo punto, "Luo ha detto. "Ma come forma relativamente meno studiata di propulsione subacquea, è vantaggioso in termini di un meccanismo semplice per un'efficace fuga istantanea e un'elevata manovrabilità. Ciò lo rende promettente per l'integrazione con la tipica propulsione a propulsore per ottenere la manovrabilità su richiesta".