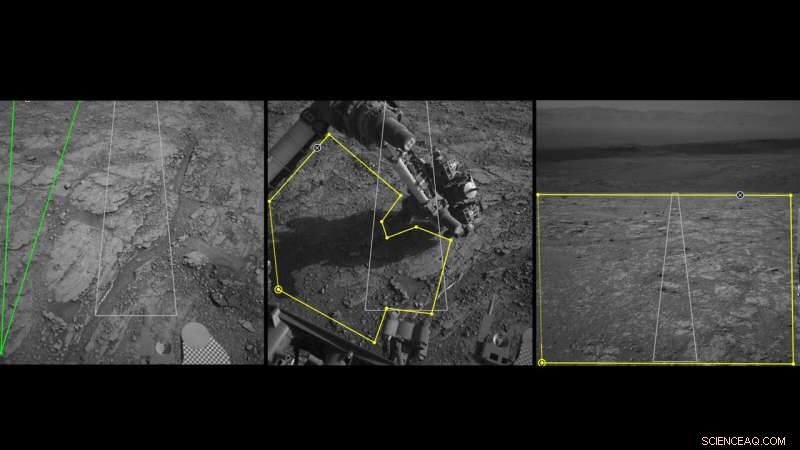
Tre immagini dello strumento chiamato AI4Mars mostrano diversi tipi di terreno marziano visti dal rover Curiosity della NASA. Disegnando bordi attorno alle caratteristiche del terreno e assegnando loro una delle quattro etichette, puoi aiutare ad addestrare un algoritmo che identificherà automaticamente i tipi di terreno per i pianificatori di rover di Curiosity. Credito:NASA/JPL-Caltech
Potresti essere in grado di aiutare i conducenti del rover Curiosity della NASA a navigare meglio su Marte. Utilizzando lo strumento online AI4Mars per etichettare le caratteristiche del terreno nelle immagini scaricate dal Pianeta Rosso, puoi addestrare un algoritmo di intelligenza artificiale per leggere automaticamente il paesaggio.
È una grande roccia quella a sinistra? Potrebbe essere sabbia? O forse è bello, roccia piatta. AI4Marte, che è ospitato sul sito web cittadino di scienza Zooniverse, ti consente di tracciare i confini intorno al terreno e scegliere una delle quattro etichette. Queste etichette sono fondamentali per affinare l'algoritmo di classificazione del terreno marziano chiamato SPOC (Soil Property and Object Classification).
Sviluppato presso il Jet Propulsion Laboratory della NASA, che ha gestito tutte le missioni del rover su Marte dell'agenzia, SPOC etichetta vari tipi di terreno, creare una mappa visiva che aiuti i membri del team di missione a determinare quali percorsi intraprendere. SPOC è già in uso, ma il sistema potrebbe utilizzare ulteriore formazione.
"Tipicamente, sono necessarie centinaia di migliaia di esempi per addestrare un algoritmo di deep learning, "ha detto Hiro Ono, un ricercatore di intelligenza artificiale al JPL. "Algoritmi per auto a guida autonoma, Per esempio, sono addestrati con numerose immagini di strade, segni, semafori, pedoni e altri veicoli. Altri set di dati pubblici per il deep learning contengono persone, animali ed edifici, ma nessun paesaggio marziano".
Una volta a pieno regime, SPOC sarà in grado di distinguere automaticamente tra terreno coeso, rocce alte, roccia piatta e pericolose dune di sabbia, inviare immagini sulla Terra che renderanno più facile pianificare le prossime mosse di Curiosity.
"Nel futuro, speriamo che questo algoritmo possa diventare abbastanza preciso da svolgere altre attività utili, come prevedere la probabilità che le ruote di un rover scivolino su superfici diverse, " ha detto Ono.
Il lavoro dei pianificatori Rover
Gli ingegneri JPL chiamati pianificatori rover possono trarre il massimo vantaggio da uno SPOC meglio addestrato. Sono responsabili di ogni mossa di Curiosity, che si tratti di fare un selfie, gocciolando campioni polverizzati nel corpo del rover da analizzare o guidando da un punto all'altro.
Possono essere necessarie dalle quattro alle cinque ore per elaborare un'unità (che ora viene eseguita virtualmente), richiedendo a più persone di scrivere e rivedere centinaia di righe di codice. Il compito prevede anche un'ampia collaborazione con gli scienziati:i geologi valutano il terreno per prevedere se le ruote di Curiosity potrebbero slittare, essere danneggiato da rocce appuntite o rimanere bloccato nella sabbia, che ha intrappolato sia il rover Spirit che Opportunity.
I pianificatori considerano anche in quale direzione verrà puntato il rover alla fine di un'unità, poiché la sua antenna ad alto guadagno ha bisogno di una linea di vista libera verso la Terra per ricevere i comandi. E cercano di anticipare le ombre che cadono sul terreno durante un viaggio, che può interferire con il modo in cui Curiosity determina la distanza. (Il rover utilizza una tecnica chiamata odometria visiva, confrontando le immagini della fotocamera con i punti di riferimento vicini.)
In che modo l'intelligenza artificiale potrebbe aiutare
SPOC non sostituirà il complicato, lavoro dispendioso in termini di tempo dei pianificatori rover. Ma può liberarli di concentrarsi su altri aspetti del loro lavoro, come discutere con gli scienziati quali rocce studiare dopo.
"Il nostro lavoro è capire come ottenere in sicurezza la scienza della missione, "ha detto Stephanie Oij, uno dei pianificatori rover JPL coinvolti in AI4Mars. "La generazione automatica di etichette del terreno ci farebbe risparmiare tempo e ci aiuterebbe a essere più produttivi".
I vantaggi di un algoritmo più intelligente si estenderebbero ai pianificatori della prossima missione su Marte della NASA, il rover Perseveranza, che lancia questa estate. Ma prima, è necessario un archivio di immagini etichettate. Più di 8, Finora sono state caricate 000 immagini Curiosity sul sito AI4Mars, fornendo molto materiale per l'algoritmo. Ono spera di aggiungere immagini da Spirit e Opportunity in futuro. Intanto, I volontari del JPL stanno traducendo il sito in modo che i partecipanti che parlano spagnolo, Hindi, Anche il giapponese e molte altre lingue possono contribuire.