Il rover DuAxel è visto qui mentre partecipa ai test sul campo nel deserto del Mojave. Il rover a quattro ruote è composto da due robot Axel. Una parte si ancora sul posto mentre l'altra usa una fune per esplorare un terreno altrimenti inaccessibile. Credito:NASA/JPL-Caltech/J.D. Gammell
Un rover rotola su un terreno roccioso, le sue quattro ruote metalliche sferragliando fino a incontrare un pericolo apparentemente insormontabile:un ripido pendio. In basso c'è un potenziale tesoro di obiettivi scientifici. Con un tipico rover, gli operatori avrebbero bisogno di trovare un altro obiettivo, ma questo è DuAxel, un robot costruito per situazioni esattamente come questa.
Il rover è in realtà costituito da una coppia di rover a due ruote, ciascuno chiamato Axel. Per dividere e conquistare, il rover si ferma, abbassa il telaio e lo ancora a terra prima di dividersi sostanzialmente in due. Con la metà posteriore di DuAxel (abbreviazione di "dual-Axel") saldamente in posizione, la metà anteriore si sgancia e rotola su un unico asse. Tutto ciò che collega le due metà ora è un cavo che si srotola quando l'asse principale si avvicina al pericolo e si cala giù per il pendio, utilizzando strumenti riposti nel suo mozzo della ruota per studiare un luogo scientificamente attraente che normalmente sarebbe fuori portata.
Questo scenario si è svolto lo scorso autunno durante un test sul campo nel deserto del Mojave, quando un piccolo team di ingegneri del Jet Propulsion Laboratory della NASA nel sud della California ha sottoposto il rover modulare a una serie di sfide per testare la versatilità del suo design.
"DuAxel si è comportato molto bene sul campo, dimostrando con successo la sua capacità di affrontare un terreno impegnativo, ancora, e poi sgancia il suo rover Axel collegato, " disse Issa Nesnas, un tecnologo di robotica al JPL. "Axel poi manovrò autonomamente lungo pendii ripidi e rocciosi, dispiegare i suoi strumenti senza la necessità di un braccio robotico."
L'idea alla base della creazione di due rover a un asse che possono combinarsi in uno con un carico utile centrale è massimizzare la versatilità:la configurazione a quattro ruote si presta a percorrere grandi distanze attraverso paesaggi accidentati; la versione a due ruote offre un'agilità che i rover più grandi non possono.
"DuAxel apre l'accesso a terreni più estremi su corpi planetari come la Luna, Marte, Mercurio, e forse alcuni mondi ghiacciati, come la luna di Giove Europa, "aggiunse Nesna.
La flessibilità è stata costruita con pareti di crateri, fosse, scarpate, prese d'aria, e altri terreni estremi su questi mondi diversi in mente. Questo perché sulla Terra, alcuni dei migliori luoghi per studiare la geologia si trovano negli affioramenti rocciosi e sulle pareti rocciose, dove molti strati del passato sono ben esposti. Sono abbastanza difficili da raggiungere qui, figuriamoci su altri corpi celesti.
La mobilità del rover e la capacità di accedere a luoghi estremi è una combinazione allettante per Laura Kerber, un geologo planetario al JPL. "Questo è il motivo per cui trovo che il rover Axel sia davvero delizioso, " ha detto. "Invece di cercare sempre di proteggersi da pericoli come cadere o capovolgersi, è progettato per resistere a loro."

Durante la stessa prova sul campo, il rover DuAxel si separa in due robot a un asse in modo che uno possa calarsi su un pendio troppo ripido per i rover convenzionali. Credito:NASA/JPL-Caltech/J.D. Gammell
Una storia su due ruote
Il concetto radicale di due veicoli robotici funzionanti come uno ha radici alla fine degli anni '90, quando la NASA ha iniziato a esplorare idee per modulari, riconfigurabile, rover autoriparanti. Ciò ha ispirato Nesnas e il suo team al JPL a sviluppare il robusto, robot flessibile a due ruote che sarebbe diventato noto come Axel.
Hanno immaginato un sistema modulare:due Axel possono ancorarsi su entrambi i lati di un carico utile, Per esempio, o tre Axel potrebbero agganciarsi a due payload, e così via, creando un "treno" di Axel in grado di trasportare molti carichi utili. Questo concetto soddisfa anche il requisito di "auto-riparazione" della sfida della NASA:se un Axel dovesse fallire, un altro potrebbe prendere il suo posto.
Lo sviluppo di Axel è rimasto concentrato sul trasporto modulare fino al 2006, quando l'imaging satellitare della superficie marziana ha rivelato gole nelle pareti dei crateri. Dopo, la scoperta di quelli che sembravano deflussi stagionali di acqua liquida - caratteristiche scure note come lineae di pendenza ricorrente - ha accresciuto l'interesse nell'uso dei robot per prelevare campioni. Gli scienziati volevano sapere se i calanchi e le ricorrenti linee di pendenza erano causati da flussi d'acqua o qualcos'altro.
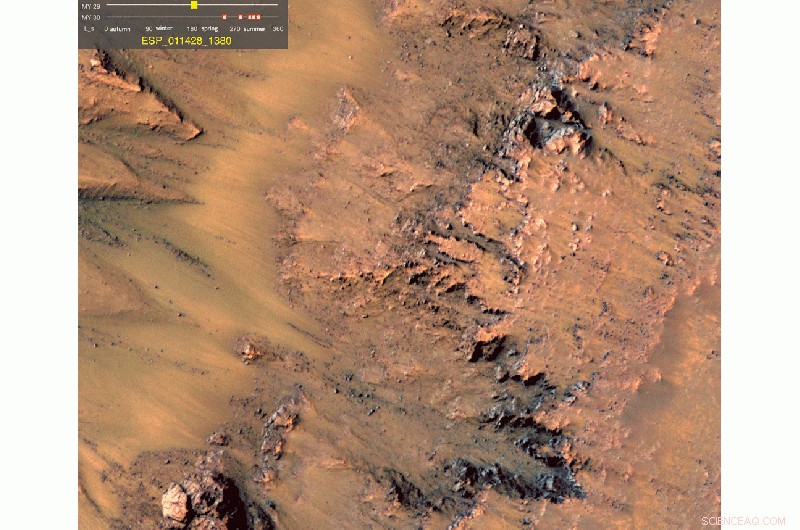
Durante le stagioni calde su Marte, spesso sui pendii dei crateri compaiono striature scure chiamate "linee di pendenza ricorrenti", come si vede in questa serie di osservazioni catturate dalla telecamera HiRISE a bordo del Mars Reconnaissance Orbiter della NASA. Il rover DuAxel è progettato per calarsi in tali aree inaccessibili per studiarle. Credito:NASA/JPL-Caltech/Università dell'Arizona
Ma i pendii sono troppo ripidi per un rover convenzionale, anche per Curiosity o il rover Perseverance che sta per atterrare, entrambi progettati per attraversare pendenze fino a 30 gradi. Esplorare direttamente queste caratteristiche richiederebbe un diverso tipo di veicolo.
Quindi Nesnas e il suo team hanno iniziato a sviluppare una versione di Axel che sarebbe stata collegata a un lander, usando il cavo non solo per discendere un lato del cratere o una ripida parete del canyon, ma anche per fornire energia e comunicare con il lander. Le sue ruote possono essere dotate di costole extra alte, o passi, per una maggiore trazione, mentre i mozzi delle ruote potrebbero ospitare microscopi, trapani, misurini per la raccolta di campioni, e altra strumentazione per studiare il terreno. Girare, l'asse a due ruote farebbe semplicemente ruotare una delle sue ruote più velocemente dell'altra.
L'interesse per la flessibilità del concetto ha portato a una fiorente famiglia di design a due ruote, tra cui A-PUFFER e BRUIE della NASA JPL, che estendono la possibilità di esplorazione a nuove destinazioni e applicazioni, anche sott'acqua su mondi ghiacciati.
Nonostante la versatilità dell'Axel legato, c'era una notevole limitazione se usato insieme a un lander stazionario:il lander avrebbe dovuto trovarsi a una distanza di discesa in corda doppia dal lato del cratere, richiedendo un grado di precisione di atterraggio che potrebbe non essere possibile per una missione planetaria.

L'Axel a due ruote scende il pendio mentre è legato alla sua controparte ancorata sopra il pendio. Il cavo funge da corda da arrampicata e fornisce anche energia e mezzo di comunicazione. Credito:NASA/JPL-Caltech/J.D. Gammell
Per rimuovere questo requisito e aumentare la mobilità, il team è tornato al design modulare originale, lo ha adattato al nuovo Axel legato, e lo chiamò DuAxel.
"Il vantaggio chiave dell'utilizzo di DuAxel è chiaro quando si ha incertezza sul sito di atterraggio, come facciamo su Marte, o vuoi trasferirti in una nuova posizione per calarti ed esplorare con Axel, " ha detto Patrick McGarey, un tecnologo robotico presso JPL e membro del team DuAxel. "Consente la guida libera dal sito di atterraggio e consente l'ancoraggio temporaneo al terreno perché è essenzialmente un robot trasformante realizzato per l'esplorazione planetaria".
Mentre DuAxel rimane una dimostrazione tecnologica ed è in attesa di essere assegnata a una destinazione, il suo team continuerà ad affinare la sua tecnologia; quel modo, quando il tempo arriva, il robot sarebbe pronto a rotolare dove altri rover temono di camminare.