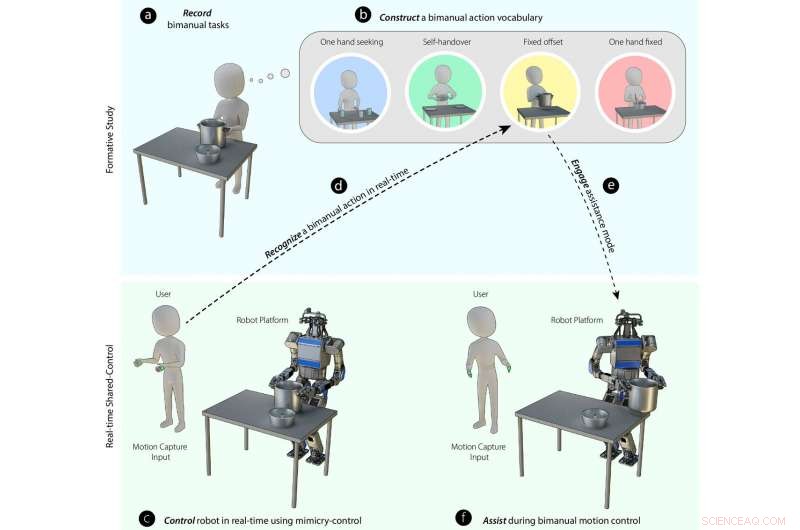
Diagramma che illustra il progetto sperimentale per la manipolazione robot bimanuale. Un "vocabolario di azione bimanuale" per i robot è stato sviluppato da un'analisi approfondita dei movimenti bimanuali umani delle mani e delle braccia (pannello superiore etichettato "studio formativo"). Un robot programmato con una rete neurale e un vocabolario di azione bimanuale è stato collegato a un volontario che ha tentato di controllare il robot per completare diversi compiti bimanuali. Il robot ha catturato le pose dell'essere umano e ha dedotto il movimento corretto attingendo dal suo vocabolario bimanuale. Credito:Rakita et al., Sci. Robot . 4, eaaw0955 (2019)
Un team di ricercatori dell'Università del Wisconsin e del Naval Research Laboratory ha progettato e realizzato un sistema robotico che consente la manipolazione bimanuale dei robot attraverso il controllo condiviso. Nel loro articolo pubblicato sulla rivista Robotica scientifica , il gruppo spiega le idee alla base del loro lavoro e quanto bene hanno funzionato nella pratica.
Come notano i ricercatori, usare due mani che lavorano insieme per completare un compito è molto complicato:richiede molto più di due mani individuali che lavorano indipendentemente sullo stesso compito allo stesso tempo. Quando una persona apre un barattolo, Per esempio, il cervello deve fungere da mediatore di sorta, dirigere l'azione mentre riceve e invia segnali a entrambe le mani. Compiti così semplici sono così complicati che i robot non sono in grado di eseguirli:ecco perché praticamente tutti i robot lavorano con una sola mano. In questo nuovo sforzo, i ricercatori hanno fatto un piccolo passo nella direzione di insegnare ai robot come usare due mani per completare un compito.
I ricercatori osservano che molte applicazioni semi-robotiche consentono ai robot di svolgere un ruolo di potenziamento, piuttosto che fare qualcosa da soli. Un chirurgo che dirige una mano robotica usando la propria è un esempio. Ma notano anche che il semplice mimetismo non funzionerebbe per i sistemi robotici aumentati a due mani:tali movimenti sono troppo complessi. La soluzione, hanno trovato, era quello di combinare il mimetismo con una rete di apprendimento profondo. Il risultato è stata una tecnica che ha permesso a un robot di svolgere compiti bimanuali condividendo il controllo con un essere umano.
Il lavoro è iniziato dotando un robot di due braccia e due mani. Hanno aggiunto hardware per consentire ai bracci del robot di comunicare con una rete di deep learning e sensori posizionati su un essere umano. A un robot è stato detto quale compito sarebbe stato tentato, e poi l'umano lo ha eseguito. Mentre l'umano lo faceva, il robot ha fatto del suo meglio per imitare l'azione allo stesso tempo. Ripetere la procedura molte volte ha permesso al robot di conoscere i tanti piccoli compiti che erano coinvolti nello svolgimento del compito principale, che ha portato a qualche intuizione da parte sua.
Col tempo, come un robot lavorava insieme a un umano, ha aggiunto i propri comandi per ottenere un risultato migliore. Il robot non è arrivato al punto di eseguire il compito da solo, invece, ha imparato a fungere da assistente potenziato più pienamente capace. I ricercatori fanno notare che un tale robot potrebbe servire come assistente per persone parzialmente disabili. Anche, sembrerebbe che la Marina possa utilizzare un simile robot per operazioni subacquee remote.
© 2019 Science X Network