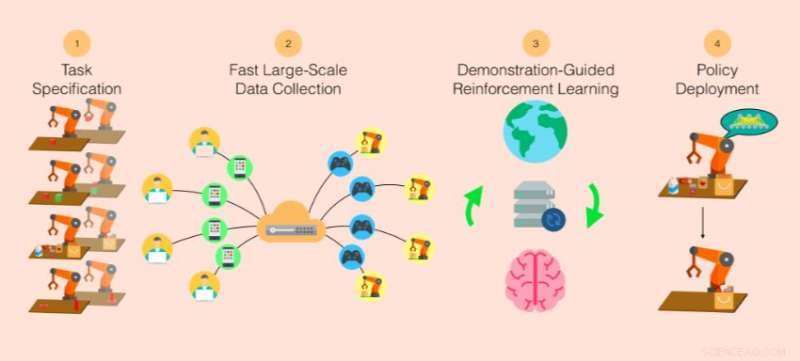
Panoramica del sistema di ROBOTURK. ROBOTURK consente un rapido apprendimento delle abilità guidato dall'imitazione. Questo sistema consiste nelle seguenti fasi principali:1) specificare un compito, 2) raccogliere una vasta serie di dimostrazioni di attività utilizzando ROBOTURK, 3) utilizzare l'apprendimento per rinforzo potenziato dalla dimostrazione per apprendere una politica, e 4) dispiegare l'abilità appresa nel dominio di interesse. Credito:Mandlekar et al.
L'apprendimento per imitazione è una branca dell'apprendimento automatico che addestra le macchine a imitare il comportamento umano mentre completano compiti particolari. Queste tecniche mostrano grandi promesse nel campo della robotica, mentre affrontano alcune delle carenze dell'apprendimento per rinforzo, come l'esplorazione e la specifica della ricompensa.
Nonostante i risultati incoraggianti, gli studi sull'apprendimento per imitazione sono stati finora limitati a set di dati di dimensioni modeste a causa delle difficoltà nel raccogliere grandi quantità di dimostrazioni di compiti utilizzando i metodi esistenti. Per affrontare queste limitazioni, un team di ricercatori supervisionati dal Dr. Silvio Savarese e dal Dr. Fei-Fei Li della Stanford University hanno sviluppato RoboTurk, una piattaforma di crowdsourcing per la teleoperazione di alta qualità basata sulla traiettoria 6-DoF utilizzando dispositivi smartphone ampiamente disponibili.
"Volevamo creare qualcosa come ImageNet for Robotics, "Ajay Mandlekar, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Riteniamo che i dati siano una limitazione fondamentale nel campo dell'apprendimento dei robot. Sebbene ci siano molti metodi che apprendono dai dati, come il controllo basato sui dati e l'apprendimento per rinforzo, la maggior parte dei metodi raccoglie i propri dati. Di conseguenza, i dati sono spesso di bassa qualità, per esempio con il robot che muove il braccio in modo casuale. Questo tipo di esplorazione può essere difficile e pericoloso, ma crediamo che gli umani possano aiutare".
ImageNet è un rinomato database di immagini creato dal Dr. Li, comunemente usato nella visione artificiale e nella ricerca sul riconoscimento degli oggetti. La piattaforma di crowdsourcing sviluppata da Stanford Vision e Learning Lab è stata progettata per fungere da risorsa simile per la robotica e gli studi sull'apprendimento dell'imitazione.
"A differenza di ImageNet, un tale sistema di raccolta dati doveva essere dinamico, permettendoci di raccogliere dati ripetutamente, spesso su richiesta, e forse anche utilizzando l'apprendimento collaborativo, "Yuk Zhu, che è stato anche coinvolto nello sviluppo di Roboturk, ha detto a TechXplore. "Questo perché i dati che vengono raccolti dipendono dai tipi di azioni che il robot intraprende nell'ambiente".
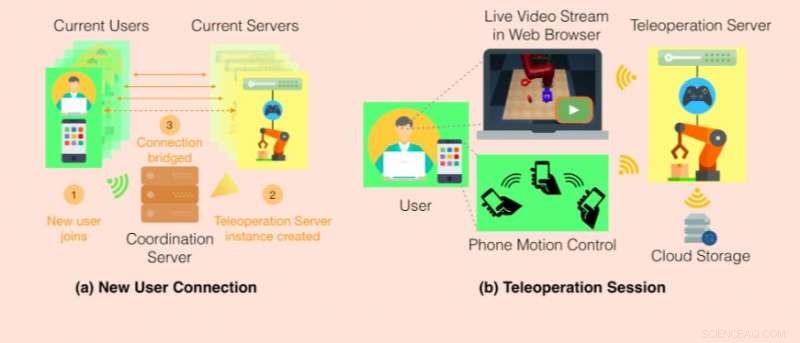
Schema di sistema di ROBOTURK. Un nuovo utente si connette a un sito Web per entrare nel sistema, e un server di coordinamento avvia un server di teleoperazione dedicato per l'utente, come mostrato in (a). Il server di coordinamento stabilisce quindi canali di comunicazione diretta tra il browser Web dell'utente e iPhone e il server di teleoperazione per avviare la sessione di teleoperazione. L'utente controlla il robot simulato spostando il telefono, e riceve un flusso video come feedback nel browser Web, come mostrato in (b). Dopo ogni dimostrazione di successo, il server di teleoperazione invia i dati raccolti a un sistema di archiviazione cloud. Credito:Mandlekar et al.
L'obiettivo finale dei ricercatori è addestrare i robot su abilità di manipolazione avanzate, consentendo loro di completare attività all'interno di ambienti industriali come l'imballaggio o l'assemblaggio. Hanno scoperto che mentre l'apprendimento per imitazione mostrava un grande potenziale in questo contesto, i set di dati esistenti erano molto limitati a causa delle difficoltà nella raccolta di grandi quantità di dimostrazioni di compiti.
"In altri domini come la visione artificiale e l'elaborazione del linguaggio naturale, la supervisione su larga scala per i set di dati viene spesso raccolta con l'assistenza del crowdsourcing, " Mandlekar ha detto. "Ciò consente un meccanismo scalabile per la supervisione umana diversificata su una vasta serie di istanze problematiche. Però, la raccolta di grandi quantità di dati è stata una sfida per le attività di robotica, poiché richiedono interazione in tempo reale e feedback da parte degli annotatori, ponendo difficili vincoli alle piattaforme di teleoperazione remota."
Il gruppo dello Stanford Vision and Learning Lab ha quindi sviluppato RoboTurk, una piattaforma di crowdsourcing che consente ai ricercatori di aumentare le competenze e i compiti che i robot possono svolgere autonomamente, attraverso l'uso di supervisione umana scalabile. Via RoboTurk, i lavoratori remoti possono accedere a un sito Web e raccogliere dimostrazioni di attività, utilizzando il proprio smartphone come controller di movimento.
"RoboTurk è supportato da un backend di simulazione basato su cloud che trasmette video in streaming al browser Web di un client utilizzando protocolli di comunicazione a bassa latenza, " Ha spiegato Mandlekar. "Ciò garantisce una qualità omogenea del servizio indipendentemente dalle risorse del computer del cliente, risultando in una piattaforma intuitiva da usare e con una bassa barriera all'ingresso, che sono i requisiti fondamentali di un'attività di crowdsourcing. RoboTurk supporta più robot, compiti, e simulatori, e può essere facilmente esteso per supportare gli altri."
I ricercatori hanno valutato la loro piattaforma su tre compiti di manipolazione di varia durata, da 15 a 120 secondi. Hanno scoperto che RoboTurk condivideva somiglianze statistiche con hardware per scopi speciali, come i controller di realtà virtuale. Hanno anche osservato che le cattive condizioni della rete non hanno influito in modo sostanziale sulla capacità degli utenti di eseguire correttamente le attività sulla piattaforma. Usando RoboTurk, hanno raccolto 137,5 ore di dati di manipolazione da lavoratori remoti, con oltre 2200 dimostrazioni di attività riuscite in 22 ore di utilizzo totale del sistema.
Credito:Mandlekar et al.
"Penso che la parte più significativa della piattaforma sia il modo in cui consentirà a umani e robot di interagire, "Animesh Garg, studente post-dottorato alla guida del progetto, ha detto a TechXplore. "I robot sono gli strumenti intelligenti del futuro. Non dovremmo considerarli come un sostituto per gli esseri umani, ma piuttosto come un modo per estendere le nostre capacità. Ciò consente agli esseri umani di essere più produttivi e di concentrarsi su problemi di intelligenza di livello superiore, nello stesso modo in cui l'avvento dei computer ha reso più facile per le persone usare la matematica come strumento per risolvere problemi di interesse."
RoboTurk consente in modo efficace l'apprendimento delle politiche su attività di manipolazione in più fasi con ricompense sparse. Inoltre, Mandlekar e i suoi colleghi hanno scoperto che l'utilizzo di grandi quantità di dimostrazioni durante l'apprendimento delle politiche ha avuto notevoli vantaggi, portando a prestazioni migliori e una maggiore coerenza di apprendimento.
Nel futuro, RoboTurk potrebbe diventare una risorsa chiave nel campo della robotica, favorire lo sviluppo di robot più avanzati e con prestazioni migliori. I ricercatori stanno ora applicando RoboTurk a robot reali, sviluppando anche algoritmi in grado di utilizzare i dati raccolti per insegnare ai robot abilità di basso livello.
"I robot sono una tecnologia molto entusiasmante che consentirà alle persone di essere più produttive e indipendenti in tutte le sfere dell'attività umana, per esempio dando una mano in cucina, accompagnatori per la popolazione anziana, e una migliore assistenza ai pazienti, " Garg ha detto. "Una delle cose che ci entusiasma è la democratizzazione della produzione. Questa tecnologia potrebbe consentire alle persone di realizzare e vendere prodotti personalizzati senza la necessità di attrezzature speciali, proprio come YouTube ha democratizzato la creazione e la distribuzione di contenuti, consentendo a chiunque di creare e condividere video."
© 2018 Science X Network