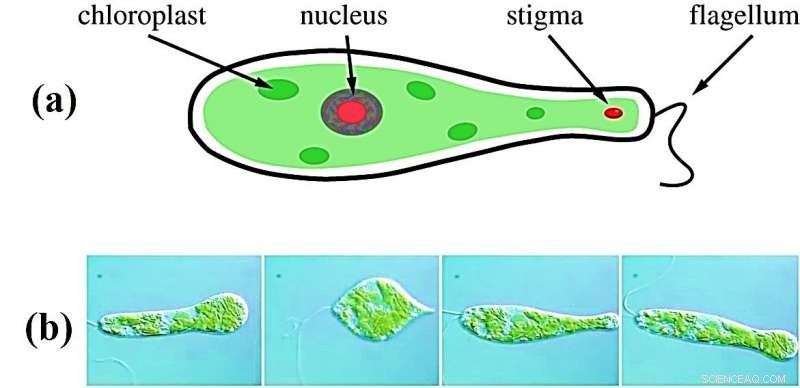
a) Illustrazione schematica di un organismo euglenoid che mostra vari organismi cellulari incluso un flagello. Immagine adattata da:IEE Robot. Autom. Lett., doi:10.1109/LRA.2017.2726113, b) Sequenza di immagini dal movimento di Eutreptiella spirogyra durante il movimento euglenoid. Immagini riprodotte con il permesso di, Richard E. Triemer, il progetto Euglenoide. Credito:RSIF, doi:10.1098/rsif.2018.0301
Il nuoto è una forma di locomozione impiegata da molti organismi in una vasta gamma di scale in natura. I microrganismi con piccola massa che incontrano il predominio delle forze viscose nel mezzo richiedono un cambiamento di forma che non varia nel tempo per ottenere una propulsione fluida allineata con l'idrodinamica. Per vincere questa sfida, i flagellati unicellulari della famiglia Euglena hanno sviluppato un movimento caratteristico noto come "movimento eugleneide" in cui il corpo cambia significativamente forma, permettendo all'organismo di navigare attraverso fluidi viscosi e piccoli spazi. Questa capacità di cambiare la forma del corpo e muoversi attraverso spazi ristretti e ambienti disordinati è particolarmente attraente nell'ingegneria dei robot biomimetici. Esempi di applicazioni di robot in miniatura includono il movimento attraverso i fluidi biologici durante le procedure mediche in vivo e la navigazione tra le macerie in ambienti esterni durante le operazioni di ricerca e salvataggio dei sopravvissuti.
Ispirato dagli euglenoidi, Krishna Manaswi Digumarti e collaboratori del Dipartimento di Ingegneria e Matematica hanno presentato il design e lo sviluppo di EuMoBot, un robot morbido multi-segmento. Il robot biomimetico potrebbe replicare grandi deformazioni del corpo per la locomozione. Nello studio, gli scienziati hanno progettato due robot di dimensioni diverse per operare con un volume interno costante. Il protocollo ingegneristico ha utilizzato l'iperelasticità delle camere elastomeriche piene di liquido per replicare il movimento degli euglenoidi. Dei due, il robot più piccolo si muoveva a una velocità di 1/5 della lunghezza del corpo per ciclo, mentre il robot più grande si muoveva a una velocità di 1/10 di lunghezza del corpo per ciclo. Lo studio ha mostrato come i robot biomimetici morbidi potrebbero essere impiegati per cambiare forma e replicare il movimento biologico, mentre funge da strumento per studiare i robot biomimetici.
Gli scienziati hanno anche presentato un metodo quantitativo basato su descrittori di Fourier ellittici per caratterizzare e confrontare la forma del robot con la sua controparte biologica euglenoid. I risultati hanno mostrato una somiglianza dell'85% nella forma, indicando che la tecnica ingegneristica era applicabile per sviluppare robot in miniatura. Il metodo ha permesso agli scienziati di comprendere l'evoluzione della forma in forme non lineari, robot morbidi dinamici che non avevano una forma specifica con cui essere modellati. I risultati dello studio sono ora pubblicati nel Journal of the Royal Society Interface .
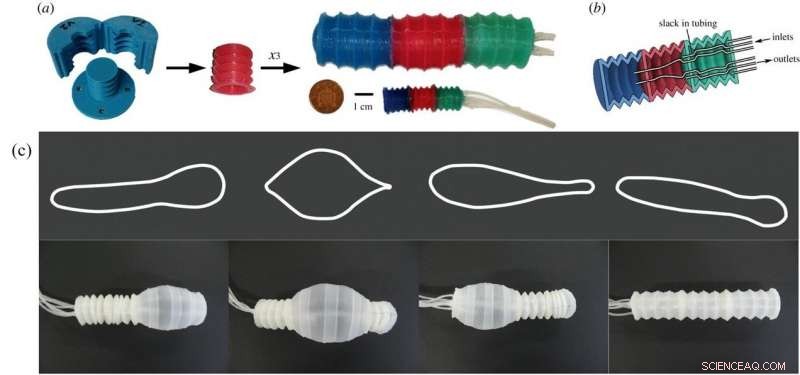
Fabbricazione del robot morbido multi-segmento unendo insieme tre attuatori HEB. a) Stampo stampato tridimensionale con due metà e un'anima utilizzata per colare l'elastomero siliconico. Al centro:una singola camera dell'attuatore. A destra:un robot a tre segmenti fabbricato su due scale diverse. Un centesimo inglese mostrato per la scala. b) Vista in sezione trasversale del robot che mostra diverse camere. Ogni camera è stata fornita con un tubo di ingresso e di uscita. Gioco sufficiente fornito per consentire la libera espansione delle camere. c) In alto:profilo delle forme cellulari durante il movimento euglenoideo. In basso:il robot morbido fabbricato che replica la forma euglenoid bioispirata. Credito:RSIF, doi:10.1098/rsif.2018.0301.
Le strategie di ingegneria biomimetica hanno ispirato i ricercatori a cercare progetti dal regno animale e creare robot di ispirazione biologica. Gli euglene sono flagellati unicellulari, ampiamente studiati in laboratorio come modelli per il loro carattere vegetale e animale. Gli organismi utilizzano strategie uniche per nuotare a bassi numeri di Reynolds e gli studi sulla loro locomozione sono relativamente recenti. Le cellule dell'organismo sono tipicamente dotate di uno o più flagelli per nuotare, mentre esibisce anche un secondo tipo di movimento più lento chiamato movimento euglenoid, in cui la cellula subisce un drammatico cambiamento di forma. In questo studio, Digumarti et al. utilizzato la seconda forma di movimento per progettare un morbido, robot funzionale basato sul comportamento del microrganismo.
La ragione evolutiva per il cambiamento di forma osservato durante il movimento euglenoid è sconosciuta, sebbene si ritenga che la deformazione delle dimensioni delle cellule sia sorta in risposta a forti stimoli come la luce, calore, shock chimico o contatto. Quando i microrganismi sono stati collocati in un labirinto microscopico pieno di liquido simile al loro ambiente naturale, molti hanno mostrato movimento euglenoid, suggerendo che il movimento era adatto per ambienti vincolati. Un movimento di questa natura può essere utile per un robot bioispirato nel campo della robotica morbida per attraversare ambienti disordinati utilizzando deformazioni di grandi corpi.
Nello studio, gli autori hanno presentato il progetto, principio di attuazione e metodo di fabbricazione per ingegnerizzare EuMoBot, un robot morbido che dimostra il movimento euglenoid. La locomozione attraverso un fluido è stata quantificata rispetto al movimento naturale del microrganismo. Poiché i meccanismi alla base del cambiamento di forma sono stati precedentemente studiati in dettaglio, Digumarti et al. si è concentrato sulla forma macroscopica dell'euglenoid in forma robotica senza replicare i cambiamenti a livello microscopico. Per generare attuatori fluidici morbidi, i ricercatori hanno progettato un nuovo dispositivo simile a un soffietto chiamato attuatore a "soffietto iperelastico" (HEB), come precedentemente dettagliato dallo stesso gruppo di ricerca.

a) Dimostrare la conformità del robot mentre si espande tra viti rigide. b) Sequenza di immagini all'inizio e alla fine di un ciclo di locomozione su tavola piana. c) Robot che si arrampica all'interno di un tubo utilizzando un'andatura del tipo a vite senza fine. Credito:RSIF, doi:10.1098/rsif.2018.0301.
Gli ingegneri hanno formato la forma dell'attuatore utilizzando uno stampo stampato in 3D. Hanno fabbricato due robot di dimensioni diverse. Hanno lanciato tre camere di attuazione, seguito da elastomero miscelato con pigmenti iniettati nello stampo per polimerizzare durante la notte e formare un involucro bianco traslucido. Il robot morbido bioispirato conteneva una camera di gonfiaggio/sgonfiaggio per replicare la forma euglenoid e ottenere la somiglianza in movimento.
Per testare la locomozione dei robot ingegnerizzati, i ricercatori li hanno posti in un serbatoio riempito con una soluzione di metilcellulosa in acqua. I robot in ogni esperimento avevano un volume interno costante, e il loro fluido interno si spostava da una camera all'altra, riproducendo il moto di un'onda di espansione caratteristica degli euglenoidi. Entrambi i robot hanno mostrato la capacità di nuotare cambiando la forma del loro corpo. La disparità di velocità dipendeva dal volume di fluido pompato attraverso le camere del robot morbido. Gli scienziati hanno osservato la somiglianza idrodinamica tra il robot morbido e il microrganismo rispetto ai numeri di Reynold in entrambe le dimensioni. Il robot morbido non si limitava semplicemente a lavorare in un ambiente fluido come sua controparte biologica, con capacità di movimento multimodale su una tavola piana e salita di un tubo utilizzando un volume di lavoro non costante.
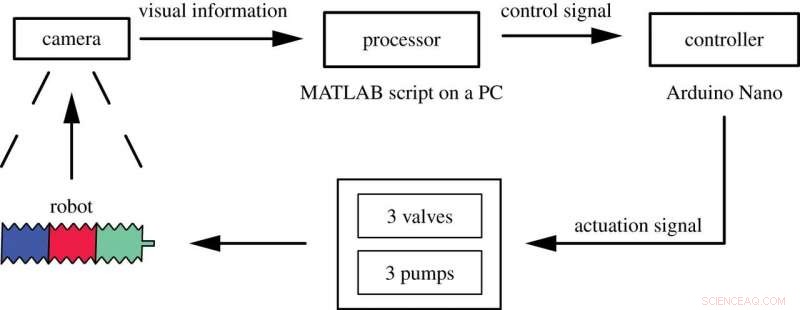
Vista schematica dell'architettura di controllo del soft robot. Una telecamera viene utilizzata per determinare lo stato attuale del robot. Uno script MATLAB elabora tali informazioni per determinare lo stato attuale del robot, che include l'espansione e la contrazione di ciascuna camera. Quindi passa attraverso i segnali di controllo appropriati a un Arduino, che controlla il funzionamento di pompe e valvole per dirigere il flusso di fluido all'interno del robot. Credito:RSIF, doi:10.1098/rsif.2018.0301.
Il robot utilizza un approccio basato sul feedback per il controllo autonomo, eliminando la necessità di modellare la dinamica della pompa e il flusso del fluido all'interno del robot. Una stima della visione artificiale delle dimensioni della camera tramite una fotocamera e uno script MATLAB ha fornito feedback. Il sistema utilizzava l'espansione e la contrazione di ciascuna camera per controllare il flusso del fluido all'interno del robot. I sensori all'interno del robot hanno consentito misurazioni dirette della pressione del fluido.
La stima della forma del robot è stata realizzata con descrittori matematici estratti utilizzando precedenti registrazioni video dell'organismo. Gli scienziati hanno utilizzato il descrittore di Fourier ellittico per contorni chiusi per descrivere la forma di un robot morbido iperelastico e lo hanno confrontato per la prima volta nello studio con un organismo biologico. Il descrittore di Fourier ellittico è stato estratto in quattro fasi principali per stimare la forma dell'oggetto. La quantità di varianza nella forma catturata da un autovettore è stata utilizzata per misurare quantitativamente la somiglianza nella forma tra il robot e l'organismo. La forma degli euglenoidi era distintamente caratterizzata dai primi tre componenti principali, mentre la varianza nei robot è stata distribuita su più componenti, suggerendo che le forme estreme degli euglenoidi non erano completamente riprodotte nei robot.
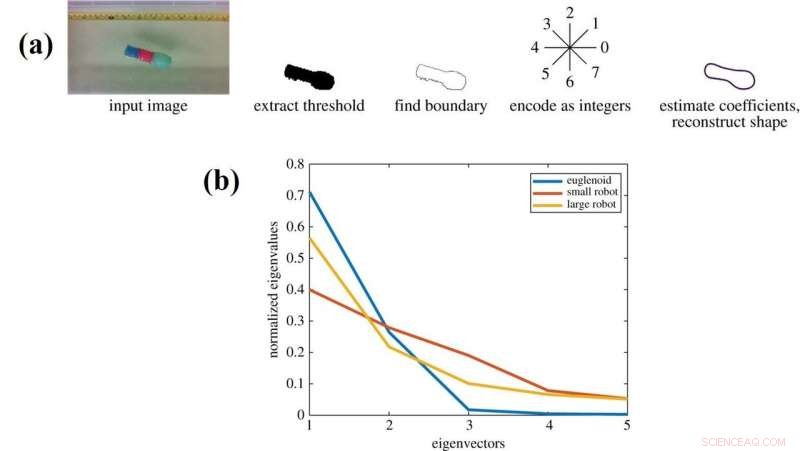
a) Le quattro fasi della stima della forma. Innanzitutto la regione di interesse viene estratta dall'immagine. Prossimo, il confine è individuato. Questo contorno viene quindi codificato come un insieme di interi di Freeman. Finalmente, viene calcolato un insieme di coefficienti di Fourier, e ricostruita la forma. b) Autovalori normalizzati dei primi cinque autovettori che descrivono la forma dei soft robot rispetto all'euglenoide. Credito:RSIF, doi:10.1098/rsif.2018.0301.
In base agli autovalori, i robot più grandi riproducevano forme più vicine all'euglenoid rispetto ai robot più piccoli. Il motivo della differenza osservata potrebbe essere dovuto al design delle pieghe del soffietto (soffietto iperelastico-HEB). Parametri degli angoli di piega, il loro numero e la loro densità possono essere ulteriormente ottimizzati per ottenere una migliore replicazione della forma. Rispetto ai microrganismi naturali, il robot non ha prodotto uno spostamento graduale durante la transizione del fluido da una camera all'altra, potenzialmente poiché il muro di cinta sintetico, nonostante la sua elasticità, può limitare localmente l'espansione della camera. Questo può anche spiegare l'incapacità del robot di assumere forme estreme.
Nel complesso, il robot morbido multisegmento EuMoBot può replicare il movimento euglenoid oltre al nuoto con cambio di forma e locomozione in ambienti non fluidi, permettendo al robot morbido e compiacente di operare in spazi ristretti. È necessario ulteriore lavoro per comprendere la relazione tra i componenti principali e la capacità di locomozione. L'estremità delle forme mostrate dagli EuMoBots era limitata a causa della resistenza alla trazione del materiale associato e del design del dispositivo monolitico. Tecniche di fabbricazione alternative come la stampa 3D e la litografia morbida potrebbero affrontare i limiti dell'elasticità del materiale. I robot potrebbero anche essere progettati per assomigliare agli euglenoidi con precisione matematica replicando la struttura microscopica della pellicola inerente all'organismo per una transizione più fluida durante la locomozione. La capacità di guidare può essere inclusa nel design del robot con bobine azionate in lega a memoria di forma o utilizzando vincoli sul materiale con fonti di alimentazione interiorizzate per resilienza, dispositivi miniaturizzati in lavori futuri.
© 2018 Science X Network