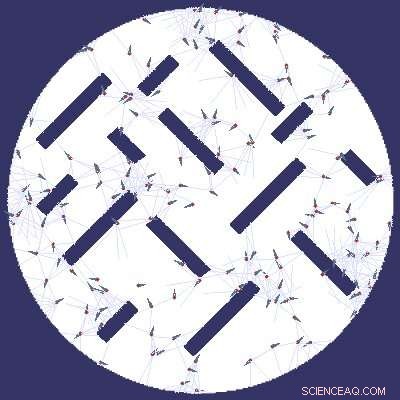
Uno dei tre ambienti di apprendimento considerati, vale a dire la locomozione. In locomozione, gli agenti imparano a navigare nell'ambiente evitando ostacoli (rettangoli scuri) e altri agenti. Credito:Amine Boumaza.
Ri combinazione, il riarrangiamento del materiale genetico a seguito dell'accoppiamento o della combinazione di segmenti di DNA di organismi diversi, presenta numerosi vantaggi evolutivi. Ad esempio, consente agli organismi di rimuovere mutazioni deleterie dai loro genomi e assumere mutazioni più utili.
Amine Boumaza, un ricercatore presso l'Université de Lorraine, ha recentemente cercato di applicare questo processo alla robotica evolutiva incorporata online, un'area della robotica che si concentra sulla replica delle teorie dell'evoluzione nei robot. Nel suo giornale, pubblicato sulla rivista GECCO '19 Proceedings of the Genetic and Evolutionary Computation Conference, ha sviluppato un operatore di ricombinazione ispirato dall'evoluzione e lo ha addestrato su tre compiti che richiedono la collaborazione tra più robot.
"La mia ricerca rientra nell'argomento più ampio dell'IA, e più specificamente, capire come possiamo progettare agenti che possono imparare a completare compiti interessanti, " Boumaza ha detto. "Questo argomento di ricerca non è nuovo, ma piuttosto vecchio, e ultimamente ha ricevuto molta attenzione a causa degli impressionanti risultati del deep learning. Nel mio caso, Sono più interessato alla robotica degli sciami, dove l'obiettivo è far cooperare un gran numero di piccoli robot per risolvere un compito e adattarsi ai cambiamenti nel loro ambiente."
Affascinato dalle strategie evolutive, in particolare ricombinazione, che equipaggiano meglio gli organismi viventi per affrontare le sfide della vita, Boumaza si è proposto di indagare se meccanismi simili potessero essere applicati agli approcci robotici. La sua ipotesi era che, se replicato con successo nei robot, la ricombinazione ne aumenterebbe le prestazioni e l'efficienza.
"Quando parliamo di agenti robotici, generalmente assumiamo un'entità fisica incarnata in un ambiente (ad esempio un robot aspirapolvere in una stanza), " Boumaza ha detto. "Questo agente percepisce l'ambiente circostante utilizzando una serie di sensori (sensori di ostacolo, telecamera, eccetera.), che può dargli una sorta di rappresentazione del suo ambiente. L'agente può agire anche nell'ambiente utilizzando effettori (motori, braccia, spazzola per la pulizia, eccetera.). Queste azioni sono il risultato di un calcolo che è l'output di ciò che comunemente chiamiamo controller (cioè una sorta di programma decisionale)."

Uno dei tre ambienti di apprendimento considerati, vale a dire la raccolta di oggetti. Nella raccolta di oggetti, gli agenti devono raccogliere quanti più oggetti (punti rossi) possibile. Credito:Amine Boumaza.
Un controller è essenzialmente un programma che elabora le percezioni acquisite da un robot tramite i suoi sensori e invia comandi ai suoi effettori. Nel caso di un robot aspirapolvere, ad esempio, un controller elaborerebbe informazioni sull'ambiente circostante, rilevare se c'è polvere davanti ad esso, quindi produrre output che faranno attivare il robot al robot e avanzare per aspirare la polvere.
"Facendo un ulteriore passo, possiamo anche considerare più agenti che possono evolvere nello stesso ambiente, " Boumaza ha detto. "Progettare controller per ogni agente in tali impostazioni è un problema molto difficile per il quale non esiste ancora una tecnica efficiente. In questo caso, possiamo averne pochi (ad es. da 10 a 100) robot complessi, o molti robot molto semplici (ad es. centinaia) che interagiscono in modi solitamente ispirati al comportamento degli insetti; questo è ciò che chiamiamo swarm robotics."
Quando si sviluppa un robot in grado di completare efficacemente un compito particolare, i ricercatori devono progettare un controller su misura per quel compito specifico. Se l'ambiente in cui deve operare il robot è semplice, progettare questo controller può essere abbastanza facile, eppure la maggior parte delle volte, Questo non è il caso.
Questo diventa ancora più difficile, se non impossibile, quando si considerano più robot che interagiscono in un dato ambiente. La ragione principale di ciò è che uno sviluppatore umano non può prevedere tutte le situazioni che ogni robot incontrerà, nonché le azioni più efficaci per affrontare ciascuna di queste situazioni. Fortunatamente, negli ultimi anni, i progressi nell'apprendimento automatico hanno aperto nuove interessanti possibilità per la ricerca sulla robotica, consentendo agli sviluppatori di incorporare strumenti che consentono l'apprendimento continuo, essenzialmente addestrando il controllore ad affrontare numerose situazioni nel tempo.
"Un modo per progettare un controller in questo modo è utilizzare algoritmi evolutivi, quale, parlando in modo approssimativo, cercare di imitare l'evoluzione naturale delle specie per far evolvere i controllori di agenti robotici, " Boumaza ha detto. "Si tratta di un processo iterativo in cui, man mano che gli animali si adattano meglio ai loro ambienti, il controller migliora nel risolvere un compito. L'obiettivo non è simulare l'evoluzione naturale, ma piuttosto prendi ispirazione da esso."
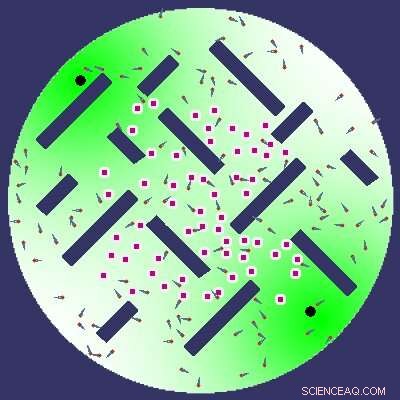
Uno dei tre ambienti di apprendimento considerati, vale a dire foraggiamento. Nel foraggiamento gli agenti devono raccogliere gli oggetti e riportarli al nido (uno dei due cerchi neri). Il pavimento di colore verde è una scia di feromoni che aggiunge un senso di direzione, è altamente concentrato nelle posizioni del nido e meno concentrato più lontano. Credito:Amine Boumaza.
La robotica evolutiva è solo una delle tante tecniche che i ricercatori possono utilizzare per progettare controller di robot. Negli ultimi anni, però, approcci evolutivi hanno guadagnato popolarità, con un numero crescente di studi volti a replicare le strategie evolutive osservate negli animali e nell'uomo.
"La robotica evolutiva ha alcuni vantaggi, come il fatto che non abbiamo bisogno di specificare come risolvere il compito (viene scoperto/imparato dall'algoritmo), ma semplicemente bisogno di specificare un modo per misurare quanto bene viene eseguito il compito, " ha detto Boumaza. Ha anche alcuni inconvenienti, poiché è un processo molto lento e ad alta intensità di calcolo, che può essere molto difficile da eseguire su robot reali. Inoltre, questi approcci sono in genere molto sensibili alle misure di performance, in quanto condizionano il comportamento appreso dagli agenti”.
Boumaza, come altri ricercatori del settore, ha cercato di sviluppare nuovi approcci per superare le carenze delle tecniche di robotica evolutiva esistenti. Nel suo recente studio, ha specificamente proposto l'uso di un nuovo "operatore di accoppiamento" ispirato alla ricombinazione, che può migliorare la velocità di convergenza nelle simulazioni di robot. Questo è un risultato notevole, in quanto potrebbe in definitiva ridurre il tempo necessario per trasferire un approccio dalle simulazioni ai robot reali.
Ha applicato il suo operatore di ricombinazione a tre compiti di robotica collettiva:locomozione, raccolta di oggetti e foraggiamento di oggetti. Ha quindi confrontato le prestazioni ottenute utilizzando una versione puramente mutativa del suo algoritmo con quella di diversi operatori di ricombinazione. I risultati raccolti nei suoi esperimenti suggeriscono che, se correttamente progettato, le strategie di ricombinazione possono infatti migliorare l'adattamento di uno sciame di robot in tutti i compiti da lui considerati.
Nel futuro, il nuovo approccio alla robotica evolutiva da lui proposto potrebbe essere utilizzato per migliorare le prestazioni e l'adattabilità dei robot in compiti che richiedono la collaborazione tra più agenti. Intanto, però, Boumaza prevede di testare il suo algoritmo su nuovi compiti, per determinare se il miglioramento che ha osservato nei tre compiti su cui si è concentrato è ancora valido.
"Sarebbe anche interessante verificare se il mio approccio può essere implementato su robot reali, " disse Boumaza. "In teoria nulla lo impedisce, tranne avere un gran numero di robot fisici e accettare di affrontare il "gap di realtà" (cioè ciò che vediamo nella simulazione di solito non è ciò che accadrebbe nella realtà, a causa delle semplificazioni della simulazione. La robotica dello sciame è tutta una questione di numeri e i fallimenti di un singolo robot non dovrebbero ostacolare lo sciame. In definitiva, perciò, per accertare la validità di questo approccio deve essere testato nella realtà, sui robot fisici."
© 2019 Science X Network