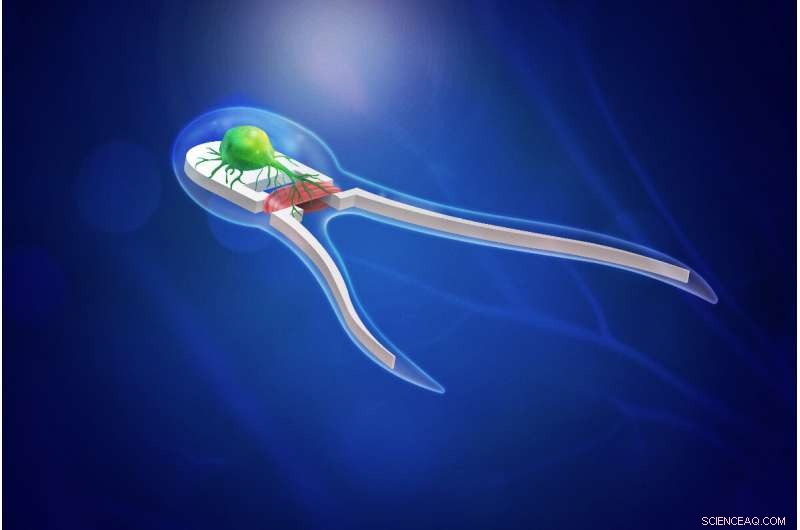
Rappresentazione artistica di una nuova generazione di biobot:dispositivi robotici morbidi alimentati da tessuto muscolare scheletrico stimolato dai motoneuroni di bordo. Credito:Michael Vincent
I ricercatori hanno sviluppato dispositivi robotici morbidi guidati da tessuto neuromuscolare che si attiva quando stimolato dalla luce, avvicinando l'ingegneria meccanica allo sviluppo di biobot autonomi.
Nel 2014, team di ricerca guidati dal professore di scienze meccaniche e ingegneria Taher Saif e dal professore di bioingegneria Rashid Bashir presso l'Università dell'Illinois hanno lavorato insieme per sviluppare i primi biobot bioibridi semoventi che nuotano e camminano alimentati battendo cellule muscolari cardiache derivate da ratti.
"Il nostro primo studio sui nuotatori ha dimostrato con successo che i robot, modellato sugli spermatozoi, potrebbe infatti nuotare, " Saif ha detto. "Quella generazione di robot a coda singola utilizzava tessuto cardiaco che batte da solo, ma non potevano percepire l'ambiente o prendere decisioni".
In un nuovo studio pubblicato su Atti dell'Accademia Nazionale delle Scienze e guidato da Saif, i ricercatori dimostrano una nuova generazione di robot a due code alimentati da tessuto muscolare scheletrico stimolato dai motoneuroni di bordo. I neuroni hanno proprietà optogenetiche:dopo l'esposizione alla luce, i neuroni si attiveranno per attivare i muscoli.
"Abbiamo applicato una coltura cellulare di neuroni optogenetici, derivato da cellule staminali di topo, adiacente al tessuto muscolare, "Saif ha detto. "I neuroni sono avanzati verso il muscolo e hanno formato giunzioni neuromuscolari, e il nuotatore si riunì da solo".
Dopo aver confermato che il tessuto neuromuscolare era compatibile con i loro scheletri sintetici di biobot, il team ha lavorato per ottimizzare le capacità del nuotatore.
Il gruppo di ricerca comprende, da sinistra, professore Taher Saif, studente laureato Onur Aydin, studente laureato Xiastian Zhang, il professor Mattia Gazzola, studente laureato Gelson J. Pagan-Diaz, seduto, e professore e preside del Grainger College of Engineering, Rashid Bashir. Credito:L. Brian Stauffer
"Abbiamo usato modelli computazionali, guidato dal professore di scienze meccaniche e ingegneria Mattia Gazzola, per determinare quali attributi fisici porterebbero al nuoto più veloce ed efficiente, " Saif ha detto. "Per esempio, abbiamo esaminato le variazioni nel numero di code e nella lunghezza della coda per un design più efficiente del nuotatore bioibrido".
"Dato che gli attuatori biologici, o biobot, non sono maturi come altre tecnologie, non sono in grado di produrre grandi forze. Questo rende il loro movimento difficile da controllare, " Ha detto Gazzola. "È molto importante progettare con cura l'impalcatura attorno a cui i biobot crescono e con cui interagiscono per ottenere il massimo dalla tecnologia e raggiungere le funzioni della locomotiva. Le simulazioni al computer che eseguiamo svolgono un ruolo fondamentale in questo compito in quanto possiamo abbracciare una serie di possibili progetti e selezionare solo quelli più promettenti per i test nella vita reale".
"La capacità di guidare l'attività muscolare con i neuroni apre la strada a un'ulteriore integrazione delle unità neurali all'interno dei sistemi bioibridi, "Ha detto Saif. "Data la nostra comprensione del controllo neurale negli animali, potrebbe essere possibile andare avanti con la progettazione neuromuscolare bioibrida utilizzando un'organizzazione gerarchica delle reti neurali".
Saif ha affermato che lui e il suo team prevedono questo progresso che porterà allo sviluppo di sistemi viventi ingegnerizzati multicellulari con la capacità di rispondere in modo intelligente ai segnali ambientali per applicazioni in bioingegneria, medicina e tecnologie dei materiali di autoguarigione.
Però, il team riconosce che, come gli organismi viventi, non si svilupperanno due macchine bioibride esattamente uguali.
"Proprio come i gemelli non sono veramente identici, due macchine progettate per svolgere la stessa funzione non saranno le stesse, "Ha detto Saif. "Uno può muoversi più velocemente o guarire dai danni in modo diverso dall'altro, un attributo unico delle macchine viventi".