Credito:North Carolina State University
Un team di ricercatori di ingegneria ha compiuto un progresso fondamentale nel controllo dei cosiddetti robot morbidi, utilizzando campi magnetici per manipolare a distanza catene di microparticelle incorporate in dispositivi robotici morbidi. I ricercatori hanno già creato diversi dispositivi che utilizzano la nuova tecnica.
"Inserendo queste catene autoassemblanti in robot morbidi, siamo in grado di fargli svolgere funzioni più complesse pur mantenendo un design relativamente semplice, "dice Joe Tracy, professore associato di scienza e ingegneria dei materiali presso la North Carolina State University e autore corrispondente di un articolo sul lavoro. "Le possibili applicazioni per questi dispositivi vanno dalle pompe attivate a distanza per la somministrazione di farmaci allo sviluppo di strutture dispiegabili a distanza".
La nuova tecnica si basa su lavori precedenti nel campo dell'autoassemblaggio, compositi ad azionamento magnetico di Tracy e Orlin Velev, il Professore INVISTA di Ingegneria Chimica e Biomolecolare presso NC State.
Per questo studio, i ricercatori hanno introdotto microparticelle di ferro in una miscela polimerica liquida e quindi hanno applicato un campo magnetico per indurre le microparticelle a formare catene parallele. La miscela è stata poi essiccata, lasciando dietro di sé un film sottile di polimero elastico incorporato con le catene allineate di particelle magnetiche.
"Le catene ci consentono di manipolare il polimero a distanza come un robot morbido controllando un campo magnetico che colpisce le catene di particelle magnetiche, "dice Tracy.
Nello specifico, la direzione del campo magnetico e la sua intensità possono essere variate. Le catene di microparticelle di ferro rispondono allineando se stesse e il polimero circostante nella stessa direzione del campo magnetico applicato.
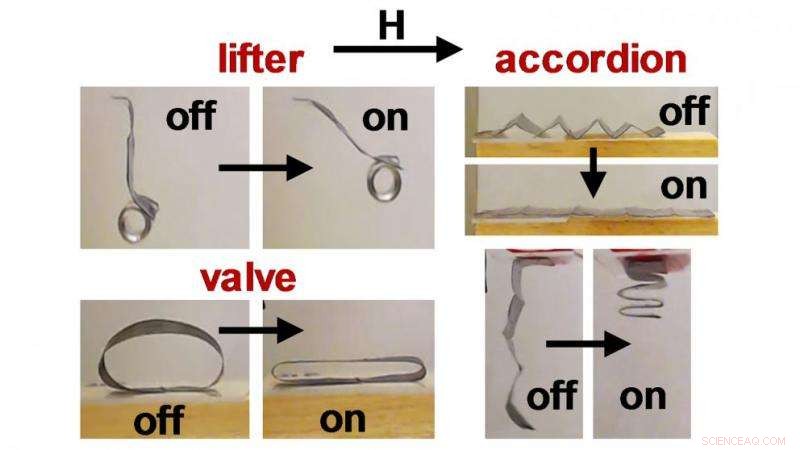
Utilizzando questa tecnica, i ricercatori hanno creato tre tipi di robot morbidi. Un dispositivo è un cantilever che può sollevare fino a 50 volte il proprio peso. Il secondo dispositivo è una struttura a fisarmonica che si espande e si contrae, imitando il comportamento del muscolo. Il terzo dispositivo è un tubo progettato per funzionare come una pompa peristaltica:una sezione compressa percorre la lunghezza del tubo, proprio come qualcuno che spreme l'ultimo pezzetto di dentifricio facendo scorrere il dito lungo il tubo.
"Stiamo lavorando per migliorare sia il controllo che la potenza di questi dispositivi, per far avanzare il potenziale della robotica morbida, "dice Tracy.
I ricercatori hanno anche sviluppato una metrica per valutare le prestazioni dei sollevatori magnetici, come il dispositivo a sbalzo.
"Lo facciamo misurando la quantità di peso che viene sollevato e tenendo conto sia della massa delle particelle nel sollevatore che della forza del campo magnetico applicato, "dice Ben Evans, co-autore dell'articolo e professore associato di fisica alla Elon University. "Pensiamo che questo sia uno strumento utile per i ricercatori in questo settore che vogliono trovare un modo empirico per confrontare le prestazioni di diversi dispositivi".