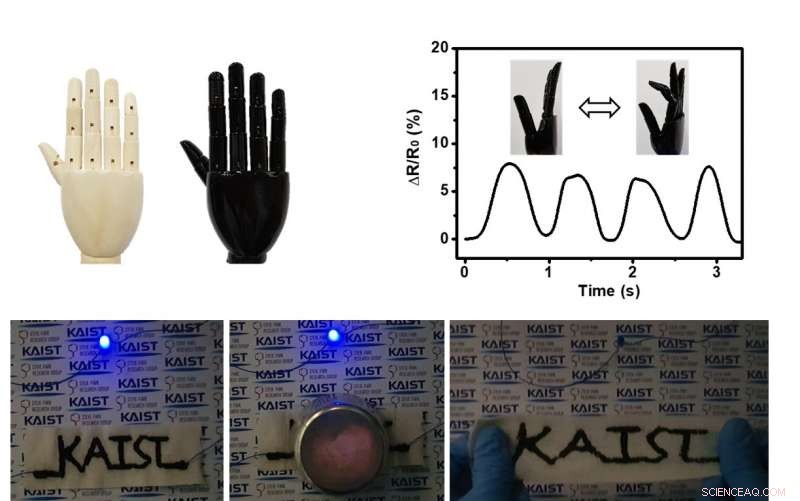
Fabbricazione di e-skin utilizzando vari metodi di stampa e rilevamento di segnali per applicazioni indossabili e robotiche. Attestazione:KAIST
I robot saranno in grado di svolgere un'ampia varietà di compiti così come gli esseri umani se potranno essere dotati di capacità di rilevamento tattile.
Un gruppo di ricerca KAIST ha riportato un allungabile, sensore di deformazione insensibile alla pressione utilizzando un processo basato sulla soluzione. Il processo è facilmente scalabile per adattarsi a grandi aree e può essere rivestito come un film sottile su superfici tridimensionali, oggetti di forma irregolare tramite verniciatura a spruzzo. Queste condizioni rendono la loro tecnica di elaborazione unica e altamente adatta per applicazioni elettroniche robotiche o indossabili.
La realizzazione di pelle elettronica per imitare le proprietà di rilevamento tattile della pelle umana è un'area di ricerca attiva per applicazioni come l'elettronica indossabile, robotica e protesi. Una delle principali sfide nella ricerca elettronica sulla pelle è differenziare gli stimoli esterni, particolarmente sforzo e pressione. Un altro problema è il deposito uniforme della pelle elettronica su superfici tridimensionali, oggetti di forma irregolare.
Per superare questi problemi, il gruppo di ricerca guidato dal Professor Steve Park del Dipartimento di Scienza e Ingegneria dei Materiali e dal Professor Jung Kim del Dipartimento di Ingegneria Meccanica ha sviluppato una pelle elettronica che può essere uniformemente rivestita su superfici tridimensionali e distinguere gli stimoli meccanici. La nuova pelle elettronica può anche distinguere gli stimoli meccanici in modo analogo alla pelle umana.
La struttura della pelle elettronica è stata progettata per rispondere in modo diverso sotto pressione applicata e sforzo. Sotto sforzo applicato, le vie conduttive subiscono significative modificazioni conformazionali, modificando notevolmente la resistenza. D'altra parte, sotto pressione applicata, si verifica un cambiamento conformazionale trascurabile nella via di conduzione; e-skin non è quindi sensibile alla pressione. Il team di ricerca sta attualmente lavorando su sensori di pressione insensibili alla deformazione da utilizzare con i sensori di deformazione sviluppati.
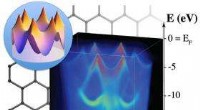
Il team di ricerca ha anche mappato spazialmente il ceppo locale senza l'uso di array di elettrodi modellati utilizzando la tomografia ad impedenza elettrica (EIT). Utilizzando l'EIT, è possibile ridurre al minimo il numero di elettrodi, aumentare la durata, e consentire una facile fabbricazione su superfici tridimensionali.
Il professor Park ha detto, "La nostra pelle elettronica può essere prodotta in serie a basso costo e può essere facilmente rivestita su complesse superfici tridimensionali. È una tecnologia chiave che può avvicinarci alla commercializzazione della pelle elettronica per varie applicazioni nel prossimo futuro".
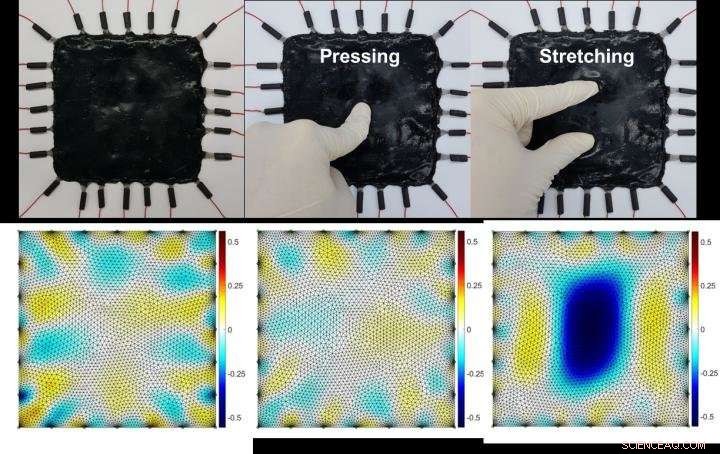
Rilevamento di stimoli meccanici mediante tomografia ad impedenza elettrica. Attestazione:KAIST