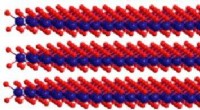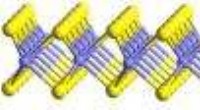
La molecola-matrice è come una fitta rete di nastro biadesivo. Credito:Max Planck Institute for Intelligent Systems Tübingen
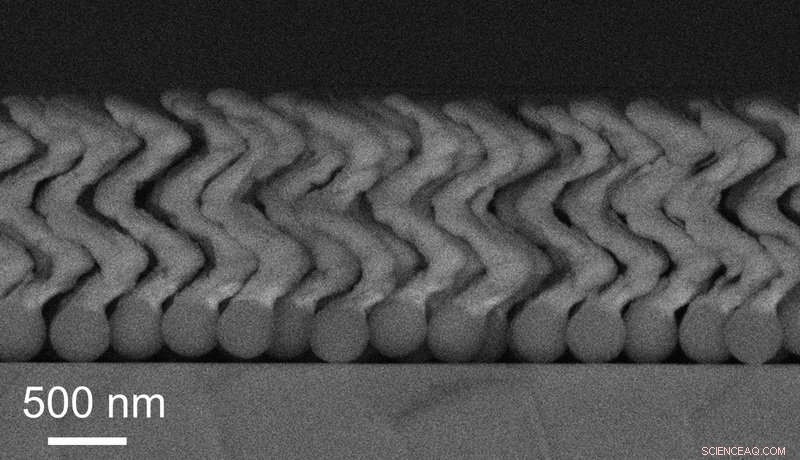
Ricercatori del Micro, Laboratorio di nanosistemi e sistemi molecolari presso il Max Planck Institute for Intelligent Systems di Stoccarda, insieme a un team internazionale di scienziati, hanno sviluppato nanorobot a elica che, per la prima volta, sono in grado di perforare il tessuto denso come è prevalente in un occhio. Hanno applicato un rivestimento antiaderente alle nanoeliche, che sono larghi solo 500 nm, esattamente abbastanza piccoli da passare attraverso la stretta matrice molecolare della sostanza gelatinosa nel vitreo. Le punte sono 200 volte più piccole del diametro di un capello umano, anche più piccolo della larghezza di un batterio. La loro forma e il loro rivestimento scivoloso consentono alle nanoeliche di muoversi relativamente senza ostacoli attraverso un occhio, senza danneggiare il tessuto biologico sensibile che li circonda. Questa è la prima volta che gli scienziati sono stati in grado di guidare i nanorobot attraverso un tessuto denso, per quanto finora, è stato dimostrato solo in sistemi modello o fluidi biologici. La visione dei ricercatori è di caricare un giorno le nanoeliche con farmaci o altri agenti terapeutici e guidarle verso un'area mirata, dove possono consegnare il farmaco dove è necessario.
La somministrazione mirata di farmaci all'interno di un tessuto biologico denso è molto impegnativa, soprattutto a queste piccole scale:in primo luogo, è la consistenza viscosa dell'interno del bulbo oculare, la stretta matrice molecolare che una nanoelica deve attraversare. Funge da barriera e impedisce la penetrazione di strutture più grandi. In secondo luogo, anche se i requisiti dimensionali sono soddisfatti, le proprietà chimiche della rete biopolimerica nell'occhio comporterebbe comunque che la nanoelica rimanga bloccata in questa rete di molecole. Immagina un minuscolo cavatappi che si fa strada attraverso una rete di nastro biadesivo. E in terzo luogo c'è la sfida di un'attuazione precisa. Quest'ultimo gli scienziati hanno superato aggiungendo un materiale magnetico, come il ferro, quando si costruiscono le nanoeliche, che consente loro di guidare i trapani con campi magnetici verso la destinazione desiderata. Gli altri ostacoli superati dai ricercatori realizzando ogni nanoelica di dimensioni non superiori a 500 nm, e applicando un rivestimento antiaderente a due strati. Il primo strato è costituito da molecole legate alla superficie, mentre il secondo è un rivestimento con fluorocarbon liquido. Ciò riduce drasticamente la forza adesiva tra i nanorobot e il tessuto circostante.
"Per il rivestimento ci ispiriamo alla natura, " spiega il primo autore dello studio Zhiguang Wu. Era un ricercatore Humboldt presso l'MPI-IS e ora è postdoc presso il California Institute of Technology. "Nella seconda fase, abbiamo applicato uno strato liquido trovato sulla pianta carnivora carnivora, che ha una superficie scivolosa sul peristoma per catturare gli insetti. È come il rivestimento in teflon di una padella. Questo rivestimento scivoloso è fondamentale per la propulsione efficiente dei nostri robot all'interno dell'occhio, in quanto riduce al minimo l'adesione tra la rete proteica biologica nel vitreo e la superficie dei nostri nanorobot".
"Il principio della propulsione dei nanorobot, le loro piccole dimensioni, così come il rivestimento scivoloso, sarà utile, non solo negli occhi, ma per la penetrazione di una varietà di tessuti nel corpo umano, "dice Tian Qiu, uno degli autori corrispondenti dell'articolo, e un capogruppo nel Micro, Laboratorio di nanosistemi e sistemi molecolari presso l'MPI-IS.
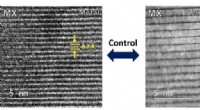
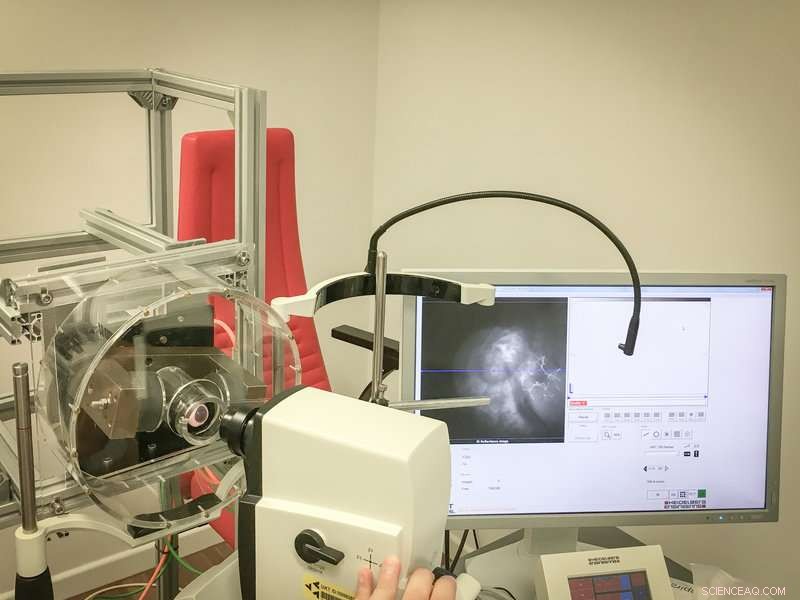
Sia Qiu che Wu fanno parte di un team di ricerca internazionale che ha lavorato alla pubblicazione dal titolo "Uno sciame di microeliche scivolose penetra nel corpo vitreo dell'occhio". Anche, l'Università di Stoccarda, l'Istituto Max Planck per la ricerca medica di Heidelberg, l'Istituto di tecnologia di Harbin in Cina, L'Università di Aarhus in Danimarca e l'Ospedale oculistico dell'Università di Tubinga hanno contribuito al lavoro innovativo. È stato all'ospedale oculistico, dove i ricercatori hanno testato le loro nanoeliche in un occhio di maiale sezionato e dove hanno osservato il movimento delle eliche con l'aiuto della tomografia a coerenza ottica, una tecnica di imaging clinicamente approvata ampiamente utilizzata nella diagnostica delle malattie degli occhi.
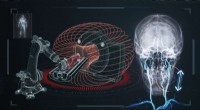
Attraverso l'occhio verso la retina
Credito:Max Planck Institute for Intelligent Systems Tübingen
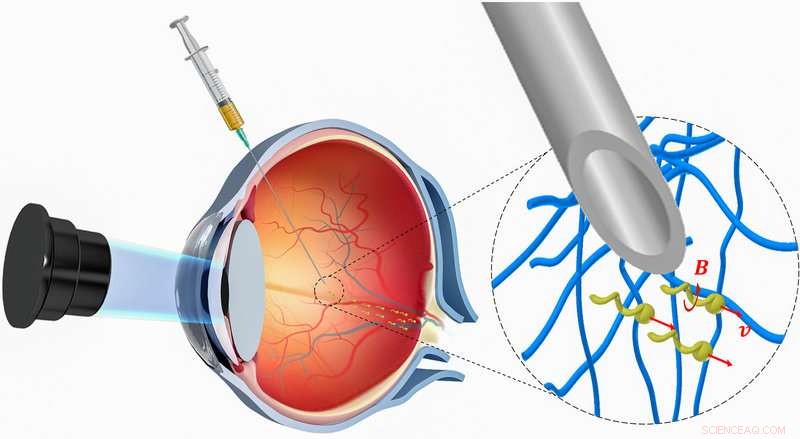
Con un ago piccolo, i ricercatori hanno iniettato decine di migliaia dei loro robot elicoidali delle dimensioni di un batterio nell'umor vitreo dell'occhio. Con l'aiuto di un campo magnetico circostante che fa ruotare le nanoeliche, poi nuotano verso la retina, dove atterra lo sciame. Nanorobot scivolosi penetrano in un occhio. Essere in grado di controllare con precisione lo sciame in tempo reale era ciò a cui miravano i ricercatori. Ma non finisce qui:il team sta già lavorando su un giorno utilizzando i propri nano-veicoli per applicazioni di consegna mirate. "Questa è la nostra visione, " dice Tian Qiu. "Vogliamo essere in grado di utilizzare le nostre nanoeliche come strumenti nel trattamento minimamente invasivo di tutti i tipi di malattie, dove l'area problematica è difficile da raggiungere e circondata da tessuto denso. Non troppo lontano nel futuro, potremo caricarli di droga».
Questo non è il primo nanorobot sviluppato dai ricercatori. Ormai da diversi anni, hanno creato diversi tipi di nanorobot utilizzando un sofisticato processo di produzione 3D sviluppato da Micro, Gruppo di ricerca sui nanosistemi e sistemi molecolari guidato dal professor Peer Fischer. Miliardi di nanorobot possono essere realizzati in poche ore vaporizzando biossido di silicio e altri materiali, compreso il ferro, su un wafer di silicio sotto vuoto spinto mentre gira.
Credito:Max Planck Institute for Intelligent Systems Tübingen