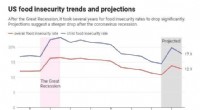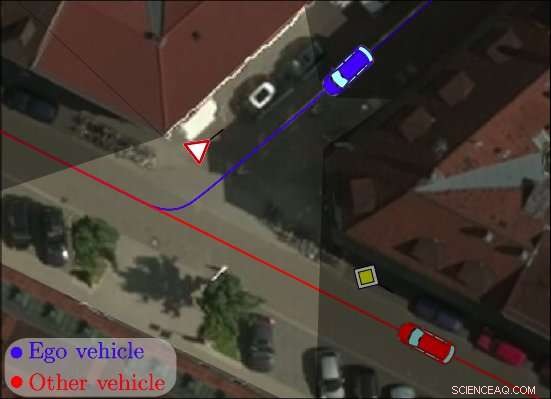
Uno scenario di intersezione esemplare che evidenzia un caso d'uso dell'approccio proposto. Il veicolo dell'ego, raffigurato in blu in tutto questo documento, procede a un incrocio a cui deve cedere. Il veicolo ha una visibilità limitata e un veicolo che si interseca si sta avvicinando dalla regione occlusa. Il progettista del veicolo deve considerare che potrebbe esserci un veicolo in avvicinamento e ridurre adeguatamente la sua velocità. Credito:Tas &Stiller.
I ricercatori del Centro di ricerca FZI per la tecnologia dell'informazione hanno sviluppato un nuovo metodo che potrebbe migliorare la pianificazione del movimento dei veicoli autonomi all'interno di ambienti incerti o in condizioni di visibilità limitata. La loro carta, pre-pubblicato su arXiv, delinea una tecnica per evitare collisioni nell'evoluzione del caso peggiore di un dato scenario.
"La guida automatizzata in ambienti urbani e in condizioni difficili è sia una sfida che rimane in cima alla ricerca, " I ricercatori hanno scritto nel loro articolo. "Le condizioni meteorologiche e di luce avverse si traducono in una scarsa qualità della percezione introducendo maggiori incertezze e campi recettivi limitati".
Le sfide descritte dai ricercatori sono forse di ancora maggiore rilevanza negli ambienti urbani, dove gli eventi imprevisti rendono più difficile prevedere l'esito di una situazione. Per affrontare queste difficoltà, studi passati hanno cercato di sviluppare sistemi di percezione all'avanguardia per veicoli automatizzati.
Ciò nonostante, anche il più avanzato di questi sistemi, dotato di sensori e tecnologie all'avanguardia, spesso lottano per affrontare l'incertezza, riducendo così semplicemente il rischio di collisioni. Per affrontare questo problema, i ricercatori di FZI si sono concentrati sulla pianificazione del movimento in un ambiente incerto con occlusioni.
"In questo documento abbiamo analizzato le incertezze a cui è soggetto un veicolo automatizzato, " hanno spiegato i ricercatori. "Abbiamo studiato diverse situazioni di traffico impegnative per un veicolo con un campo recettivo limitato".
Dopo aver studiato le condizioni in cui un pianificatore del movimento deve considerare i veicoli in avvicinamento da regioni non visibili, i ricercatori hanno ideato un approccio per rilevare rapidamente comportamenti non conformi. Il loro approccio imita in qualche modo il modo in cui i conducenti umani in genere si avvicinano agli incroci, guidando con più cautela e a velocità ridotta.
"Vi presentiamo un metodo per rimanere senza collisioni per l'evoluzione nel caso peggiore della scena data, " hanno scritto i ricercatori. "Definiamo criteri che misurano i margini disponibili per una collisione considerando la visibilità e le interazioni e di conseguenza integriamo le condizioni che applicano questi criteri in un pianificatore di movimento basato sull'ottimizzazione".
I ricercatori hanno valutato il loro metodo in un ambiente di simulazione a circuito chiuso e hanno scoperto che si generalizzava bene in diversi scenari urbani. Il loro approccio è stato ora integrato in un veicolo automatizzato, chiamato BERTAONE.
"Il nostro lavoro futuro affronterà scenari più complessi, dove sono disponibili una moltitudine di percorsi e opzioni di manovra come cambi di corsia, " hanno scritto i ricercatori.
© 2018 Science X Network