È difficile immaginare un'impresa più drammatica di un viaggio nello spazio, in cui anime coraggiose si sigillano in veicoli sorprendenti e vengono lanciate da esplosioni controllate in un ambiente ostile a tutta la vita conosciuta, tutto in nome della scienza e dell'audacia umana.
Far atterrare un'astronave sulla luna non sarebbe stato lo stesso senza gli astronauti. Attraverso il loro commento, le persone sulla Terra che guardavano le immagini sgranate in bianco e nero del paesaggio lunare condividevano una connessione con l'eterno e l'extraterrestre. Il loro viaggio ci ha dotato di un'esperienza comune più grande di qualsiasi cosa Hollywood potesse creare, perché era reale.
I viaggi nello spazio hanno il sopravvento sugli astronauti perché il corpo umano non è adatto alle dure condizioni che governano i regni oltre la nostra atmosfera. All'interno di una capsula o navetta, i viaggiatori spaziali devono esercitarsi regolarmente per evitare la perdita di densità ossea e l'atrofia muscolare causata da periodi prolungati trascorsi in condizioni di microgravità. I compartimenti dell'equipaggio devono essere pressurizzati con la giusta miscela di gas respirabili e vapore acqueo, e i sistemi devono far circolare e rivitalizzare quei gas per mantenere l'aria respirabile. Anche la temperatura deve essere attentamente regolata, per non parlare dei sistemi di approvvigionamento di cibo e acqua e di smaltimento dei rifiuti.
articoli Correlati
Al di fuori, gli astronauti incontrano temperature che possono oscillare da 248 gradi F (120 gradi C) a meno 148 gradi F (meno 100 gradi C), ed è proprio vicino alla Terra. La temperatura dello spazio profondo precipita a meno 454 gradi F (meno 270 gradi C). Senza l'atmosfera terrestre a proteggerli dalle radiazioni solari, gli astronauti sopravvivono indossando tute spaziali ingombranti che costano milioni di dollari l'una e non sono pratiche in caso di emergenza. Se la Stazione Spaziale Internazionale (ISS) fosse stata colpita da un oggetto e avesse bisogno di essere riparata immediatamente, un astronauta impiegherebbe ore per prepararsi per una passeggiata spaziale ed eseguire le riparazioni [fonte:Coulter, "Robonaut 2 verrà lanciato a febbraio"].
La NASA e altri programmi spaziali riconoscono la fragilità del corpo umano e stanno lavorando su come sfruttare al meglio il tempo dei loro astronauti riducendo la loro esposizione al pericolo. Uno degli approcci più entusiasmanti attualmente in corso ha dato origine a una nuova razza di astronauti, uno più adatto a sopravvivere al di fuori della navicella spaziale.
In questo articolo, impareremo a conoscere lo sviluppo di questi astronauti robotici, o robotnauti , e come aiuteranno gli umani nello spazio.
Sonde e rover robotici viaggiano su Marte da prima che sbarchiamo sulla luna. Nel 1965, Marinaio IV ha inviato le prime immagini a distanza ravvicinata del pianeta rosso. Nel 1997, il Pathfinder il rover ha fornito dettagli senza precedenti sull'atmosfera e sulla superficie marziana. Inoltre, chi può dimenticare i notevoli contributi di Spirito e Opportunità , i due rover su Marte lanciati nell'estate del 2003 che sono sopravvissuti così tanto alla loro missione originale?
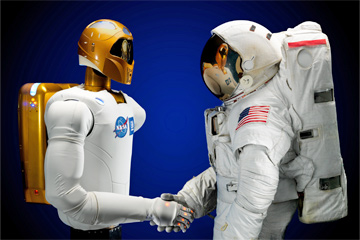
La NASA ha basato i suoi astronauti robotici su un design umanoide. Il primo di questi, Robonaut 1 (aka R1 ), caratterizzato da una testa, due occhi, due braccia e due mani a cinque cifre. I progettisti hanno protetto la testa di R1 con un casco in resina epossidica e hanno montato la testa su un collo articolato, che gli permetteva di girarsi da una parte all'altra e di guardare in alto e in basso. All'interno del robonauta pionieristico, consegnate due videocamere stereovisione all'operatore e abilitato R1 a tracciare gli oggetti. La stereovisione imita la visione umana confrontando le immagini di un "occhio" destro e sinistro (fotocamera) e usando parallasse -- l'apparente differenza nella posizione di un oggetto causata dal diverso angolo di visione di ciascun occhio -- per determinare la profondità e rilevare il movimento. Le braccia di R1 erano in grado di eseguire un raggio di movimento maggiore rispetto alle braccia umane e contenevano più di 150 sensori ciascuna.
La NASA ha iniziato la costruzione di R1 nel 1997, ed è servito come piattaforma sperimentale in prove di laboratorio e sul campo fino al 2006. È stato un proof of concept di successo, ma non ha mai lasciato il laboratorio.
Nel 2006, La NASA ha firmato un accordo con General Motors per produrre Robonaut 2 ( R2 ). GM stava anche sviluppando robot abili all'epoca e aveva lavorato con la NASA sul rover lunare. La NASA ha presentato R2 nel febbraio 2010, e il robonauta si è recato nella sua sede permanente sulla Stazione Spaziale Internazionale il 24 febbraio, 2011, in una delle ultime missioni dello Space Shuttle.
Come R1, R2 è progettato per aiutare gli esseri umani e per automatizzare ripetizioni, compiti noiosi o stancanti, come l'impostazione degli strumenti e delle attrezzature necessarie per le missioni, che consentono agli astronauti di concentrarsi su compiti che solo loro sono qualificati per svolgere.
Pensa a R2 come R1-plus:più piccolo, più economico, più avanzato e capace di sopravvivere ai rigori del lancio e dello spazio. R2 fornisce più di 350 sensori, 40 dei quali utilizza per rilevare l'ambiente circostante. Ciò include quattro telecamere a luce visibile negli occhi e una quinta telecamera a infrarossi nella bocca per favorire la percezione della profondità. Il suo stomaco contiene 38 processori per computer. Sebbene la sua forza sia alla pari con quella di R1 - può sollevare circa 20 libbre (9 chilogrammi) - R2 è più abile con le sue pratiche appendici:mentre le mani di R1 erano simili alle mani guantate di un astronauta, Gli R2 sono più simili a mani umane senza guanti.
R2 può manipolare una coperta, prendi una busta e impugna un manubrio, ma la sua destrezza è maggiore della somma delle sue parti. Gli utenti possono controllare la rigidità articolare di R2, che dà a R2 un vantaggio rispetto ai tipici robot "controllati dalla posizione" come i robot di assemblaggio di automobili, che mancano di "dare" nei loro sistemi e devono allinearsi perfettamente per fare il loro lavoro. Un robot del genere farebbe schifo a mettere un piolo in un buco; anche un leggero disallineamento causerebbe la rottura del piolo nell'area intorno al foro. R2, al contrario, può "sentire" la strada di casa, muovendo dolcemente il piolo in avanti e facendo piccolo, correzioni di scorrimento se disallineate, come farebbe un essere umano. La flessibilità di R2 lo rende anche più sicuro per i suoi compagni umani, che può fermare il suo moto senza troppa forza, evitando così lesioni.
Ecco le specifiche per Robonaut 1 e 2:
Specifiche Robonaut 1
Robonaut 2
Altezza 6,23 piedi (1,9 metri) 3,33 piedi (1,0 metri) (dalla vita alla testa) Il peso 410 libbre (182 chilogrammi) 330 libbre (150 chilogrammi) Materiali strutturali
Principalmente alluminio con imbottitura in Kevlar e Teflon per proteggerlo da fuoco e detriti Principalmente alluminio con acciaio, fibra di carbonio nichelata e materiali non metallici Piattaforma di calcolo
Processore PowerPC38 processori PowerPC Sistema operativo
VxWorksVxWorks
Qualunque sia il futuro dei robotnauti, la competizione si sta scaldando come una navetta al rientro.
Robonaut 2 (R2), come il suo predecessore, è controllato tramite telepresenza, in cui una persona - un astronauta o un operatore al controllo missione - guida il robot a distanza mentre guarda attraverso i suoi occhi tramite le telecamere di bordo. L'operatore può indossare guanti per azionare le mani di R2, o controllare i movimenti della testa di R2 indossando un casco collegato a distanza alla testa del robot.
R2 non è un semplice burattino, però. Come i rover su Marte, il robonauta opera anche in autonomia controllata, il che significa che viene caricato con sequenze di comandi (script) che gli dicono come eseguire determinate attività in modo autonomo. Un operatore monitora i suoi progressi durante queste azioni e può apportare le correzioni necessarie in tempo reale. La speranza è che R2 un giorno diventi robo-trainee a robo-employee e richieda pochissima osservazione o direzione.
Come R1, Il cervello di R2 è costituito da una serie di processori PowerPC, una tecnologia utilizzata in altre applicazioni spaziali, che eseguono il sistema operativo in tempo reale VxWorks. La NASA afferma che questa combinazione offre un'elaborazione flessibile e supporta varie attività di sviluppo. Il software di sistema è scritto in C e C++. Il software ControlShell aiuta il processo di sviluppo e fornisce un ambiente di sviluppo grafico, che migliora la comprensione del sistema e del codice da parte dei ricercatori.
Inizialmente, R2 sarà confinato in un laboratorio sulla Stazione Spaziale Internazionale. Là, eseguirà i test utilizzando una serie di schede con interruttori, manopole e connettori come quelli utilizzati dagli astronauti. Gli ingegneri sul campo invieranno aggiornamenti hardware e software secondo necessità. Infine, R2 sarà dotato di una gamba o di gambe complete di dita che si adattano agli appigli incorporati nelle pareti della stazione, che consentirà a R2 di arrampicarsi lasciando le mani libere per trasportare attrezzature o svolgere compiti.
Infine, R2 riceverà apparecchiature per attività extraveicolare (EVA) e potrà fare passeggiate spaziali fuori dalla stazione. Sarà quindi in grado di allestire cantieri e ridurre il tempo che l'uomo deve trascorrere all'aperto. Poiché può passare all'esterno molto più rapidamente degli astronauti, R2 sarà in grado di rispondere anche alle emergenze. La NASA sta lavorando su una batteria (attualmente l'R2 deve essere collegato) per aumentare l'autonomia dell'R2, e i futuri robonauti potrebbero essere dotati di ruote o persino di un jetpack per missioni esplorative e di manutenzione. Né i robot abili come R2 si limiteranno a esplorare lo spazio:un giorno, potrebbero entrare in luoghi pericolosi sulla Terra al posto degli umani, come vulcani e centrali nucleari.
Vai alla pagina successiva per ulteriori letture robotiche che potrebbero piacerti.
articoli Correlati
Altri ottimi link
Fonti