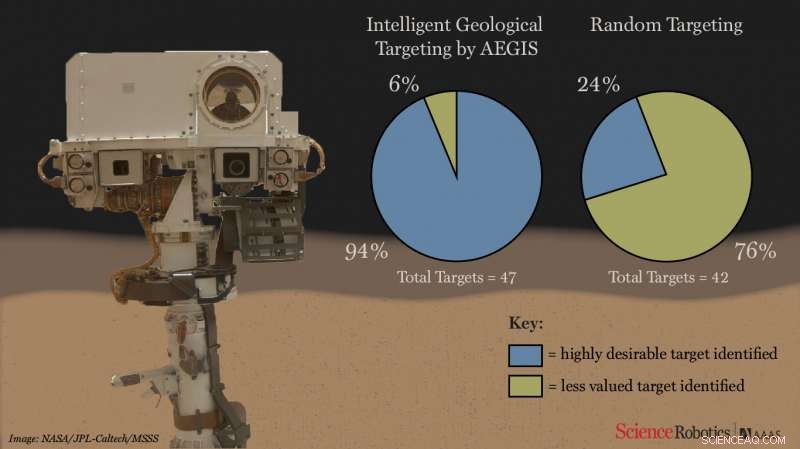
Prendendo solo 21, 000 del totale di 3,8 milioni di righe di codice della missione Curiosity, AEGIS ha selezionato accuratamente gli obiettivi desiderati su 2,5 chilometri di terreno marziano inesplorato il 93% delle volte, rispetto al 24% previsto senza il software. In questo caso, il bersaglio desiderato era affiorare, un tipo di roccia marziana ideale per analizzare la storia geologica del pianeta rosso. Credito:Carla Schaffer / AAAS
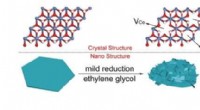
(Phys.org)—Un team di ricercatori dagli Stati Uniti, Danimarca e Francia hanno creato un rapporto sulla creazione e l'uso di software destinati a dare più autonomia ai robot esploratori nello spazio. Nel loro articolo pubblicato sulla rivista Robotica scientifica , il team descrive il software, chiamato Esplorazione autonoma per la raccolta di scienza aumentata (AEGIS), e come si è comportato bene sul rover Curiosity su Marte.
A causa della loro limitata potenza di calcolo e della distanza dalla Terra, gli scienziati spaziali ritengono che sarebbe vantaggioso per i robot esploratori avere la capacità di selezionare quali cose studiare. Permetterebbe anche di fare ulteriori ricerche quando un robot non è in grado di comunicare con la Terra, come quando si trova sulla faccia opposta di un pianeta. Senza un tale sistema, un robot dovrebbe scansionare una regione, fotografalo, rispedisci le immagini fotografiche sulla Terra e poi attendi istruzioni su cosa fare. Con un tale sistema, un robot come Curiosity potrebbe scrutare l'orizzonte, scegli un oggetto da studiare e poi guidalo e studialo. Questo approccio farebbe risparmiare molto tempo, consentendo al robot di studiare più oggetti prima che scada la sua vita utile. A causa di ciò, La NASA ha incaricato un team di creare tale software, che alla fine divenne AEGIS. Il software è stato testato e poi caricato su Curiosity nel maggio del 2016 ed è stato utilizzato 54 volte nei successivi 11 mesi.
Il software consente al rover di controllare ciò che è stato soprannominato ChemCam, che è un dispositivo che viene utilizzato per studiare rocce o altre caratteristiche geologiche:un laser viene sparato su un bersaglio e quindi i sensori misurano i gas che si verificano di conseguenza.
I ricercatori riferiscono di aver scoperto che il sistema è accurato al 93% rispetto al 24% senza il suo utilizzo. Il software, essi sostengono, risparmiato molte ore di missione, che è stato utilizzato per impegnarsi in altre attività utili come lo studio del contenuto di meteoriti. Riferiscono inoltre che il software ha consentito un aumento del targeting di ChemCam da 256 al giorno a 327, il che significava che più dati sono stati raccolti nello stesso lasso di tempo.

(A) Lo sguardo della ChemCam. (B) ChemCam spara laser sulle rocce per analizzarne il contenuto, lasciando segni visibili sia sulla superficie (in alto a destra) che all'interno del foro di 16 mm di diametro (centro) di questo sito di perforazione "Windjana". (C) Obiettivi del suolo misurati con ChemCam. (D) Il Micro-Imager remoto su ChemCam scatta foto ad alta messa a fuoco di bersagli distanti, come questa zona della conoide alluvionale di Peace Vallis, a circa 25 km di distanza. Credito:Francesco et al., Sci. Robot. 2, eaan4582 (2017)
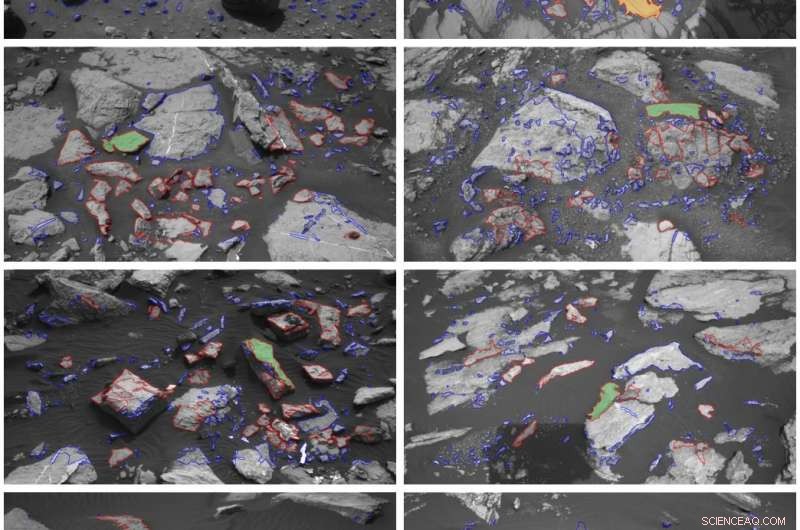
Esempi di selezione del target AEGIS, raccolti dal giorno marziano 1400 al 1660. Gli obiettivi delineati in blu sono stati respinti; quelli evidenziati in rosso sono stati mantenuti. I bersagli con il punteggio più alto sono ombreggiati in verde, e i bersagli di secondo livello sono ombreggiati in arancione. Credito:Francesco et al., Sci. Robot. 2, eaan4582 (2017)
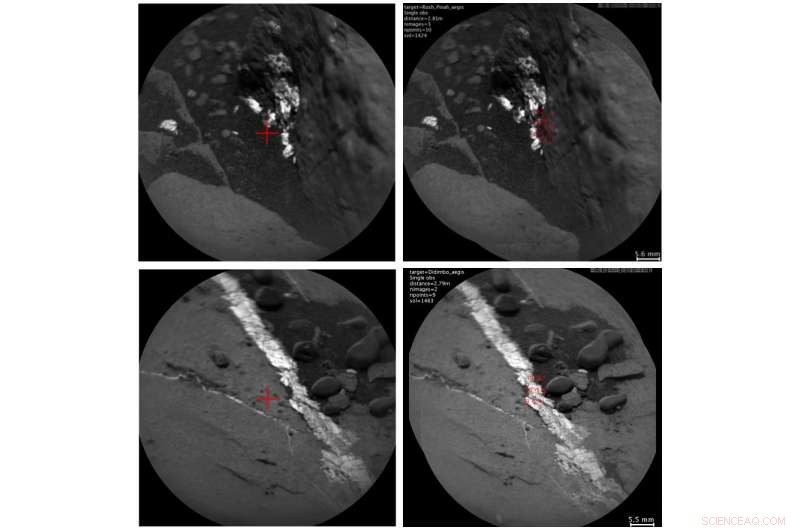
Esempi di AEGIS che fissa comandi umani che mancano il segno, chiamato "raffinamento del puntamento autonomo". (UN, C) Obiettivi calcolati dall'uomo in rosso. (B, D) Perfezionamento dell'obiettivo da parte di AEGIS indicato in rosso. Credito:Francesco et al., Sci. Robot. 2, eaan4582 (2017)
© 2017 Phys.org