Un nuovo modello di computer imita la polvere lunare così bene che potrebbe portare a teleoperazioni robotiche lunari più fluide e sicure. Lo strumento, sviluppato dai ricercatori dell'Università di Bristol e con sede presso il Bristol Robotics Laboratory, potrebbe essere utilizzato per addestrare gli astronauti in vista delle missioni lunari.
La loro ricerca è pubblicata sulla rivista Frontiers in Space Technologies .
Lavorando con il loro partner industriale, Thales Alenia Space nel Regno Unito, che ha un interesse specifico nella creazione di sistemi robotici funzionanti per applicazioni spaziali, il team ha studiato una versione virtuale della regolite, un altro nome per la polvere lunare.
La regolite lunare è di particolare interesse per le prossime missioni di esplorazione lunare previste nel prossimo decennio. Da esso, gli scienziati possono potenzialmente estrarre risorse preziose come ossigeno, carburante per missili o materiali da costruzione, per supportare una presenza a lungo termine sulla luna.
Per raccogliere la regolite, i robot gestiti a distanza emergono come una scelta pratica grazie ai rischi e ai costi inferiori rispetto al volo spaziale umano. Tuttavia, il funzionamento dei robot su distanze così grandi introduce grandi ritardi nel sistema, che li rendono più difficili da controllare.
Ora che il team sa che questa simulazione si comporta in modo simile alla realtà, può usarla per riprodurre il funzionamento di un robot sulla Luna. Questo approccio consente agli operatori di controllare il robot senza ritardi, fornendo un'esperienza più fluida ed efficiente.
L'autore principale Joe Louca, della School of Engineering Mathematics and Technology di Bristol, ha spiegato:"Pensalo come un videogioco realistico ambientato sulla luna:vogliamo essere sicuri che la versione virtuale della polvere lunare si comporti proprio come quella reale, in modo che se lo utilizziamo per controllare un robot sulla luna, si comporterà come ci aspettiamo. Questo modello è preciso, scalabile e leggero, quindi può essere utilizzato per supportare le prossime missioni di esplorazione lunare."
Questo studio fa seguito al lavoro precedente del team, che ha scoperto che gli operatori esperti di robot desiderano addestrarsi sui loro sistemi con rischi e realismo gradualmente crescenti. Ciò significa iniziare con una simulazione e sviluppare l'utilizzo di modelli fisici, prima di passare all'utilizzo del sistema reale. Un modello di simulazione accurato è fondamentale per formare e sviluppare la fiducia dell'operatore nel sistema.
Anche se in precedenza erano stati sviluppati alcuni modelli particolarmente accurati della polvere lunare, questi sono così dettagliati da richiedere molto tempo di calcolo, rendendoli troppo lenti per controllare senza problemi un robot. I ricercatori del DLR (Centro aerospaziale tedesco) hanno affrontato questa sfida sviluppando un modello virtuale della regolite che ne considera la densità, la viscosità e l'attrito, nonché la ridotta gravità della Luna. Il loro modello è interessante per l’industria spaziale poiché richiede poche risorse computazionali e quindi può essere eseguito in tempo reale. Tuttavia, funziona meglio con piccole quantità di polvere lunare.
Gli obiettivi del team di Bristol erano innanzitutto quello di estendere il modello in modo che potesse gestire più regolite, pur rimanendo abbastanza leggero da poter essere eseguito in tempo reale, e poi di verificarlo sperimentalmente.
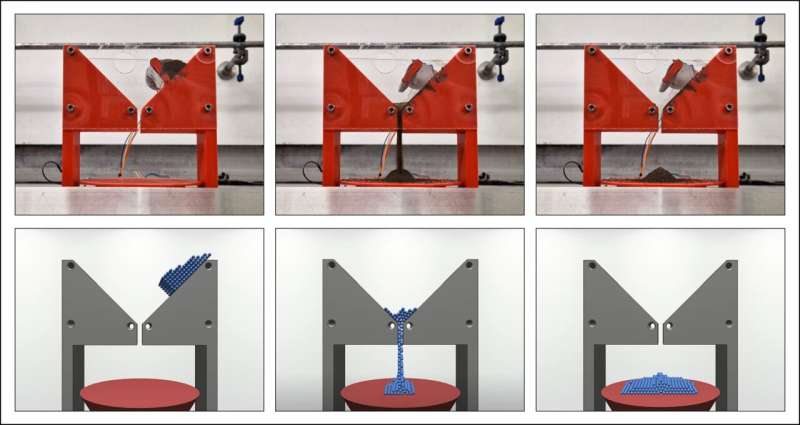
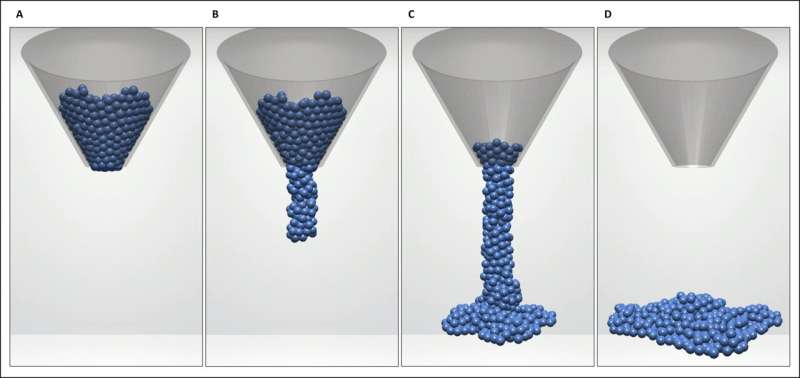
Louca ha aggiunto:"Il nostro obiettivo principale in questo progetto è stato quello di migliorare l'esperienza utente per gli operatori di questi sistemi:come potremmo semplificare il loro lavoro? Abbiamo iniziato con il modello di regolite virtuale originale sviluppato da DLR e lo abbiamo modificato per renderlo più scalabile. . Quindi, abbiamo condotto una serie di esperimenti, metà in un ambiente simulato, metà nel mondo reale, per misurare se la polvere lunare virtuale si comportava allo stesso modo della sua controparte nel mondo reale."
Poiché questo modello di regolite promette di essere accurato, scalabile e sufficientemente leggero da poter essere utilizzato in tempo reale, il team esaminerà successivamente se può essere utilizzato quando si utilizzano robot per raccogliere la regolite.
Hanno inoltre in programma di indagare se un sistema simile potrebbe essere sviluppato per simulare il suolo marziano, il che potrebbe essere utile per future missioni di esplorazione, o per addestrare gli scienziati a gestire il materiale dell'attesissima missione Mars Sample Return.
Ulteriori informazioni: Joe Louca et al, Verifica di un simulante virtuale di regolite lunare, Frontiers in Space Technologies (2024). DOI:10.3389/frspt.2024.1303964
Fornito dall'Università di Bristol