La struttura bistabile fotoindotta consente al polimero cristallino liquido fotoattivo di ottenere salti ispirati a scatto. L'accumulo e il rilascio di energia fotoindotta efficaci sono indotti dalla geometria nematica super ritorta a 270° di molecole fotoattive. Credito:Inha University
Il movimento di salto è comunemente osservato in natura, anche per i mammiferi, insetti e le altre creature terrestri; questo movimento fluido mira alla mobilità rapida, un tempo di arrivo più rapido a una destinazione su grandi ostacoli e terreni accidentati. Le proprietà qualitative del salto come direzione e altezza sono regolate da semplici frazioni di energia potenziale e cinetica. Inoltre, un organismo può scegliere di ripetere i suoi movimenti di salto come deciso di sua spontanea volontà.
Per implementare un simile tipo di comportamento di salto nei sistemi robotici, ci devono essere progetti su misura che generano un trasferimento di energia istantaneo a un substrato con sufficiente energia accumulata. Molti degli attuali robot da salto sul campo si adattano calciando o spingendo i substrati con le gambe; questo è comunemente alimentato da attuatori motorizzati o sistemi alimentati a batteria. Però, questi sistemi aggiungono peso indesiderato ai robot che saltano e sono anche difficili da fissare su un corpo miniaturizzato.
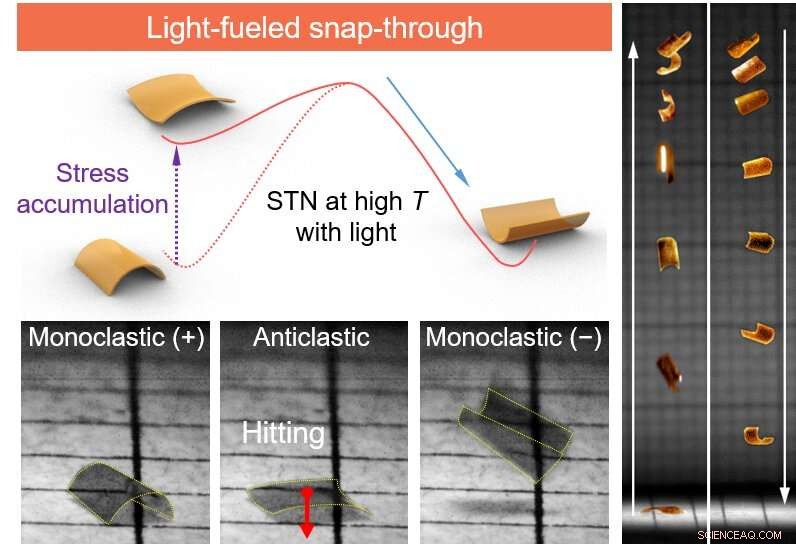
Un polimero cristallino liquido fotoattivo è in grado di saltare il movimento perché la risposta fotomeccanica anisotropa della macchina molecolare fotoattiva consente al polimero cristallino liquido di accumulare e rilasciare energia fotoindotta in modo efficace. La macchina molecolare fotoattiva, una frazione azobenzenica, è allineato con molecole di cristalli liquidi che forniscono una contrazione fotoindotta direzionale dalla fotoisomerizzazione dell'azobenzene. La geometria molecolare nematica super ritorta a 270° nella parte superiore e inferiore del polimero cristallino liquido fotoattivo induce uno stato bistabile non isometrico sotto irraggiamento di luce attinica con riscaldamento simultaneo. È noto che la struttura bistabile accumula energia al di sotto della barriera energetica per deformarsi tra due strutture stabili. Durante il processo di deformazione, l'energia accumulata inizia a superare la barriera energetica e continua a un rilascio istantaneo, il cosiddetto "snap-through". Il rilascio istantaneo di energia nel polimero cristallino liquido fotoattivo genera il movimento di salto attraverso l'impatto con il substrato. Sorprendentemente, l'altezza massima di salto raggiunge 15,5 lunghezze del corpo con la velocità istantanea massima di 880 BL s -1 .
Una sfida formidabile per un robot che salta è il salto continuo su richiesta. A differenza dei robot saltatori motorizzati, è difficile implementare il salto continuo o direzionale per un robot che salta con un corpo monolitico poiché l'angolo tra il robot e la sorgente di attuazione cambia continuamente. L'irradiazione di luce bidirezionale consente al polimero cristallino liquido fotoattivo di saltare continuamente in due modi diversi:salto fotomeccanico basato su colpi e calci. Indipendentemente dalla direzione di atterraggio o dalla curvatura del robot morbido, l'irradiazione di luce su richiesta dall'alto o dal basso fornisce movimenti di salto nei robot morbidi.
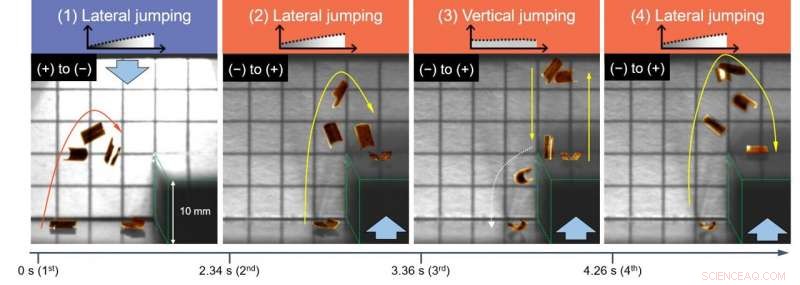
Il viaggio guidato del polimero cristallino liquido fotoattivo dalla luce modellata (una dall'alto e l'altra dal basso) per l'arrivo a destinazione in pochi secondi. Credito:Inha University
Inoltre, il salto fotomeccanico può essere guidato generando un gradiente di intensità del fascio. L'intensità della luce del gradiente rompe la simmetria della fotoisomerizzazione in un polimero cristallino liquido fotoattivo monolitico che genera la direzionalità dell'energia cinetica. Combinando l'irradiazione luminosa bidirezionale con un gradiente di intensità del fascio, il polimero liquido cristallino fotoattivo miniaturizzato può arrivare a destinazione, superando anche grandi ostacoli.
Questa strategia senza precedenti fornirà approfondimenti sulla manovrabilità del salto senza contatto nei robot morbidi miniaturizzati.