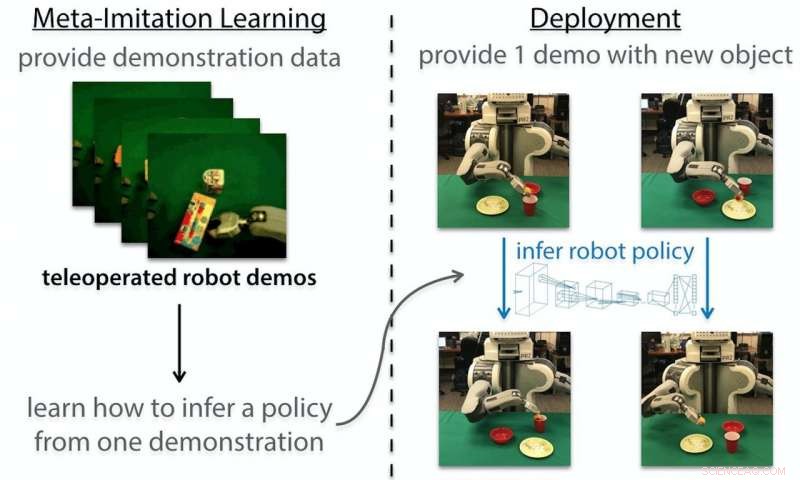
Tre passaggi per il nostro algoritmo di meta-apprendimento. Credito:Tianhe Yu e Chelsea Finn
Un team di ricercatori dell'Università di Berkeley ha trovato un modo per convincere un robot a imitare un'attività che vede su uno schermo video solo una volta. In un documento che hanno caricato su arXiv server di prestampa, il team descrive l'approccio utilizzato e come funziona.
I robot che imparano a fare le cose semplicemente osservando un essere umano che esegue un'azione una sola volta sarebbero in grado di apprendere molte più nuove azioni molto più rapidamente di quanto sia possibile ora. Gli scienziati hanno lavorato duramente per capire come realizzarlo.
Storicamente però, i robot sono stati programmati per eseguire azioni come raccogliere un oggetto tramite un codice che stabilisce espressamente cosa deve essere fatto e come. È così che funziona la maggior parte dei robot che fanno cose come assemblare automobili in una fabbrica. Tali robot devono comunque essere sottoposti a un processo di addestramento mediante il quale vengono guidati attraverso procedure più volte fino a quando non sono in grado di eseguirle senza commettere errori. Più recentemente, i robot sono stati programmati per apprendere esclusivamente attraverso l'osservazione, proprio come fanno gli umani e altri animali. Ma tale apprendimento imitativo richiede tipicamente migliaia di osservazioni. In questo nuovo sforzo, i ricercatori descrivono una tecnica che hanno sviluppato che consente a un robot di eseguire un'azione desiderata osservando un essere umano che lo fa solo una volta.
Per compiere questa impresa, i ricercatori hanno combinato l'apprendimento per imitazione con un algoritmo di meta-apprendimento. Il risultato è qualcosa che chiamano meta-apprendimento indipendente dal modello (MAML). Meta-apprendimento, spiegano i ricercatori, è un processo mediante il quale un robot apprende incorporando l'esperienza precedente. Se a un robot viene mostrato il video di un essere umano che raccoglie una pera o un altro oggetto simile, Per esempio, e mettendolo in una tazza, ciotola o altro oggetto, può ottenere una "sensazione" per un obiettivo. Se in ogni caso si insegna a imitare il comportamento in un certo modo, poi "impara" cosa fare osservando altri comportamenti simili. Così, quando vede un video di una persona che raccoglie una prugna e la mette in una ciotola, riconosce il comportamento ed è in grado di tradurlo in un proprio comportamento simile, che poi può svolgere.
© 2018 Tech Xplore