Credito:CC0 Dominio Pubblico
"C'è una crescente necessità di sviluppare soluzioni robotiche automatizzate per l'agricoltura a causa della crescente domanda di cibo, mutevoli condizioni climatiche e diminuzione della disponibilità di lavoro umano manuale, ", ha affermato Luca Scimeca, studente di dottorato di Cambridge. "Il nostro algoritmo di rilevamento della lattuga e degli steli dimostra un robot robusto per ingombrare, condizioni di luce variabili, e distanza della fotocamera, nonché alle variazioni delle dimensioni dei prodotti, forma e orientamento".
La nuova pipeline di visione artificiale e il sistema di aspirazione/aspirazione, sviluppato nel Laboratorio di Machine Intelligence del Dipartimento, è in grado di eseguire il processo di pelatura – con defogliazione completa – il 50 percento delle volte, con il processo che impiega in media 27 secondi per essere completato.
Ordinare le colture, come lattuga, e rimuovere le foglie esterne dopo la raccolta è un compito attualmente svolto dai lavoratori agricoli. Per i lavoratori agricoli questo è un compito molto facile, ma per i robot, è una visione impegnativa e un compito di manipolazione che finora è stato difficile da afferrare per le tecnologie robotiche.
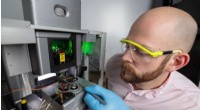
Ma ora la rimozione automatizzata delle foglie di lattuga si è avvicinata di un passo alla realtà, dopo il gruppo di ricerca, guidato dal dottor Fumiya Iida, Docente di Meccatronica, affrontato le sfide della gestione di questo morbido, prodotti fragili. La loro creazione di un ugello circolare stampato in 3D, montato sull'estremità di un braccio robotico e testato con un sistema di aspirazione, funge da unico punto di aspirazione del vuoto. È progettato per afferrare una foglia e rimuoverla dal corpo principale della lattuga utilizzando un'azione di strappo, senza causare danni al prodotto.
Fondamentale per l'accuratezza dello strappo fogliare è l'uso della visione artificiale per localizzare e determinare il posizionamento della lattuga. Lo fa rilevando prima il gambo di lattuga con l'aiuto di una webcam 2-D posizionata direttamente sopra e all'interno del presunto campo visivo. Nei casi in cui lo stelo non può essere trovato, verrà intrapresa un'azione per capovolgere la lattuga applicando una forza orizzontale e facendo rotolare la lattuga con un cuscinetto morbido attaccato al braccio del robot. Un migliore posizionamento della lattuga può quindi essere ottenuto con la foglia esterna in alto e con il minimo rischio di danneggiamento.
L'algoritmo di rilevamento della lattuga e dello stelo è stato testato su 180 immagini di singole lattughe scattate con la webcam ad altezze comprese tra 70 cm e 100 cm. Sono state utilizzate un totale di 10 diverse lattughe iceberg in diverse posizioni, e con diversa direzione e intensità della luce, con alcuni posizionati accanto a oggetti sullo sfondo disposti a rappresentare il disordine. Inoltre, Sono stati scattati 30 fotogrammi dopo aver immagazzinato i prodotti per tre giorni, con conseguente cambiamento del colore del fusto. L'algoritmo di rilevamento della lattuga è stato in grado di individuare con precisione il centro della lattuga con un'accuratezza del 100 percento e l'algoritmo di rilevamento dello stelo ha raggiunto una precisione di rilevamento dell'81,01 percento. A seguito di questi riscontri, il team di ricerca è stato in grado di identificare il punto ottimale di rimozione delle foglie di lattuga.
Luca Scimeca, dal Biologically Inspired Robotics Laboratory (BIRL), lavorato sul sistema di visione. Ha detto che il robot potrebbe essere applicato a molte altre colture, come il cavolfiore, che è molto meno fragile e che pone meno sfide quando si tratta di analisi della visione artificiale del suo orientamento.
"Il peeling delle foglie di lattuga è un interessante problema di robotica dal punto di vista ingegneristico perché le foglie sono morbide, si strappano facilmente e la forma della lattuga non è mai scontata, " ha detto. "La visione artificiale che abbiamo sviluppato, che è il cuore del nostro robot per pelare la lattuga, può essere applicato a molte altre colture, come il cavolfiore, dove sarebbero necessarie informazioni simili per la post-lavorazione del prodotto.
"Però, sono necessari ulteriori lavori per integrare le tre fasi:rilevamento della vista, sistema di arrotolamento e strappo/rimozione delle foglie, in un'unica soluzione end-to-end. Proponiamo un approccio utilizzando un robot Baxter a due bracci, dove la stima della posa e il processo di peeling sono combinati."