"Precision Jumping Limits from Flight-phase Control in Salto-1P" è il titolo accademico di un articolo che dovrebbe comunque deliziare coloro che sono interessati al movimento robotico.
Justin Yim e Ronald Fearing, Dipartimento di Ingegneria Elettrica e Informatica, Università della California, Berkeley, sono gli autori del documento. Il loro lavoro è stato presentato all'inizio di questo mese all'IROS 2018 di Madrid.
Questo è un robot monopedale, chiamato Salto-1P. Le note video descrivono ulteriormente Salto-1P come un piccolo robot da salto monopedale in grado di eseguire salti continui ad alta potenza.
Perché lo chiamano Salto? James Holloway in Nuovo Atlante accontentare i curiosi. La locomozione saltatoria sugli ostacoli del terreno è la risposta, qualunque cosa significhi "saltatoriale". Holloway e Google hanno aiutato anche lì.
Mezzi saltatoriali adatti al salto. Saltus è una parola latina per salto.
In realtà, guardare un robot con una gamba sola saltare in giro in una frenesia senza sosta è stranamente avvincente. Però, i ricercatori della UC Berkeley avevano in mente più movimenti mirati. La squadra è decisa a consegnare un robot in grado di saltare che lo porti esattamente dove atterra.
"Due piccole eliche permettono al robot di ruotare a mezz'aria, ma tutta la forza motrice viene dall'unica gamba, " disse Hackaday .
Si può capire Spettro IEEE scegliendo di chiamarlo "robotic pogo stick" (ma non è questa la storia; si tratta piuttosto di ciò che il bastone può ora realizzare). I ricercatori non erano interessati a inventare un'ipermacchina che si lanciasse da sola.
TechCrunch ha scritto sulle sue capacità:(1) può guardare una superficie per un bersaglio, ha scritto John Biggs, e (2) "essenzialmente sorvolare dove deve atterrare utilizzando eliche integrate".
Perché il loro lavoro recente è importante:è tutta una questione di controllore, che hanno aggiornato per migliorare la precisione in atterraggio - "un'impresa che era quasi impossibile usando il precedente sistema di controllo, " ha detto Bigg.
Evan Ackerman ha spiegato che l'hardware di Salto-1P è lo stesso dell'anno scorso:una gamba elastica azionata per il luppolo, "una coda inerziale che gira per controllare l'altezza, e mezzo quadricottero per controllare l'imbardata e il rollio." Ma quest'anno, è tutta una questione di controllore.
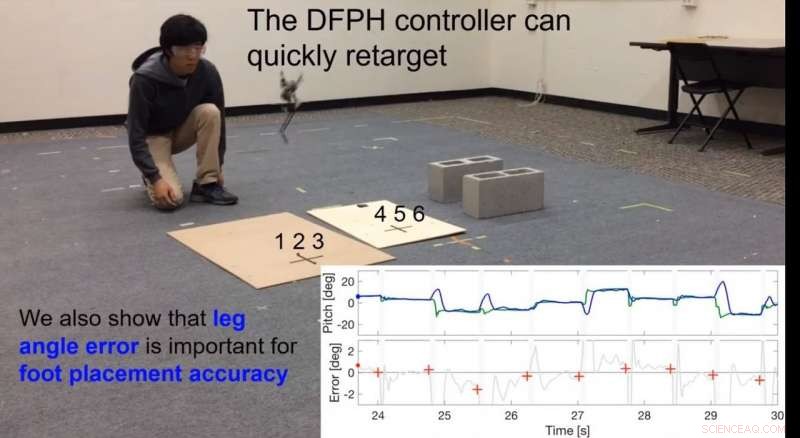
L'obiettivo del team per Salto-1P era un controller migliore per fare cose che richiedono un posizionamento accurato del piede. Ackerman ha affermato che "comportamenti ancora più aggressivi, come saltare tra i muri, comporta un'intera sequenza di salti che devono essere tutti precisi, poiché un singolo salto impreciso probabilmente farà cadere il robot e si frantumerà".
Nella loro carta, gli autori hanno discusso del loro controllo del salto di posizione del piede deadbeat. Che cosa significa? Bene, hanno a che fare con "un nuovo algoritmo di controllo che può far atterrare il piede di Salto-1P in punti particolari del terreno come saltare su pietre miliari o giocare a campana con una gamba sola". Lo chiamano "controllo del salto mortale del posizionamento del piede".
Holloway ha detto Nuovo Atlante lettori sull'approccio del team. "Il controller utilizza ciò che è noto in matematica come un'approssimazione della serie di Taylor, che può essere utilizzato per approssimare le risposte a equazioni complesse, comprese quelle forze di governo che agiscono su un punto."
Risultato finale:un robot progettato in modo tale da poter non solo saltare ma anche saltare tra i punti designati, "come se saltassi da un trampolino a un altro o giocassi a campana." Può saltare a terra, o tra oggetti di altezza crescente, disse Holloway.
Il loro elenco di lavori futuri su questo robot che salta include lo studio degli effetti del terreno non rigido o inclinato sulle prestazioni di salto e sulla strategia di controllo. Anche, secondo Ackerman, "Abbiamo parlato con Justin Yim a IROS, che ci ha detto che sta lavorando per aumentare ancora di più la precisione di salto di Salto-1P, mentre lo svezza anche dalla localizzazione esterna e dai sistemi informatici che lo tengono confinato all'interno."
© 2018 Tech Xplore