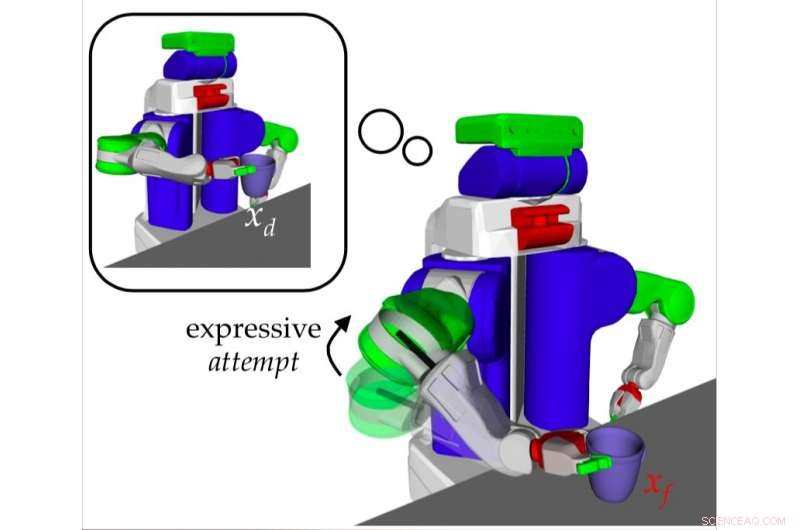
Il metodo ideato dai ricercatori genera un movimento di tentativo inteso a somigliare a un'esecuzione riuscita (ad es. spostando l'end-effector da xf a xd) rispettando i vincoli sui limiti del robot. In questo esempio, alza il gomito per comunicare che sta cercando di sollevare la tazza, ma la coppa è troppo pesante per essere sollevata da essa. Attestazione:Kwon, Huang e Dragan.
Ricercatori della Cornell University e dell'Università della California, Berkeley, hanno sviluppato un metodo per generare automaticamente movimenti con cui i robot possono esprimere la loro incapacità di completare un determinato compito. Questi movimenti generati comunicano chiaramente sia quale compito il robot non può completare sia perché non è in grado di completarlo.
"Quando si interagisce con i robot, è importante che gli esseri umani abbiano aspettative precise sulle capacità dei robot, "Minae Kwon, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Un modo per stabilire aspettative accurate è capire cosa i robot non sono in grado di fare e perché".
Attualmente, la maggior parte dei guasti dei robot sono estremamente poco informativi. In altre parole, quando il robot non è in grado di completare un'attività, potrebbe interrompersi bruscamente nel bel mezzo di un'azione o addirittura rifiutarsi di iniziare l'attività in primo luogo. Questo rende difficile per gli umani capire la causa del guasto del robot, oltre a generalizzare le sue capacità.
"Volevamo trovare un modo in cui i robot potessero comunicare in modo più intelligente le loro incapacità (cioè, cosa stanno cercando di fare e perché fallirà) anche prima che si verifichi un fallimento, "Kwon ha detto. "In particolare, ci siamo concentrati sulle incapacità relative alle attività di pianificazione del movimento (ad esempio sollevare una tazza, spingendo una porta), perché volevamo risolvere questo problema usando il movimento espressivo."
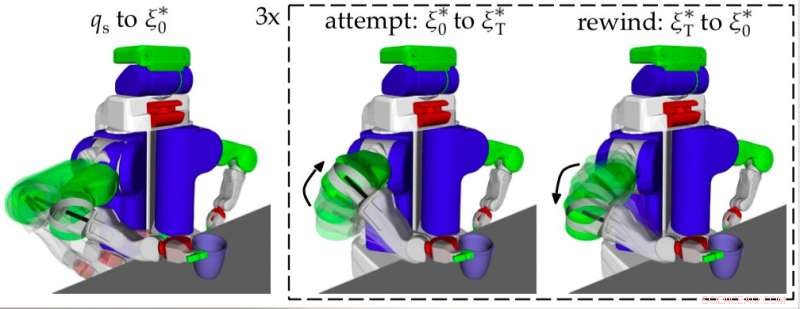
Per un dato compito incompletabile, il robot esegue prima l'attività fino al punto di errore (a sinistra), a quel punto esegue la traiettoria del tentativo ξ ∗ (al centro). Per sottolineare questo movimento, il robot quindi esegue il contrario di ξ ∗ per tornare indietro a ξ ∗ 0 (a destra), e lo ripete altre due volte. Attestazione:Kwon, Huang e Dragan.
conosciuto, i suoi colleghi Sandy Huang e la loro consulente Anca Dragan hanno affrontato questo problema nel contesto dell'ottimizzazione della traiettoria. Il loro approccio riduce al minimo la somiglianza tra il movimento che esprime l'incapacità e ciò che consentirebbe al robot di eseguire con successo il compito, considerando anche i limiti fisici del robot. Quando i ricercatori hanno valutato diverse misure di somiglianza, hanno scoperto che uno in particolare si generalizzava bene a una vasta gamma di compiti, producendo movimenti espressivi che sono adattati ai compiti individuali.
"Generiamo un tentativo di movimento, o un movimento in cui il robot fa del suo meglio per completare la traiettoria che avrebbe seguito, che è soggetto a vincolo, " ha spiegato Kwon. "Seguire la traiettoria desiderata illustra l'obiettivo del robot e il vincolo illustra il fallimento. Per comunicare l'incapacità, riavvolgiamo e ripetiamo consecutivamente questi movimenti di tentativo."
Il metodo impiegato dai ricercatori genera automaticamente movimenti che esprimono l'incapacità del robot, comunicando sia ciò che sta cercando di ottenere sia le ragioni del suo fallimento. Ciò potrebbe in definitiva migliorare la comunicazione tra utenti finali e robot, facilitando la loro collaborazione su una vasta gamma di compiti.
"Pensiamo che sia importante che le persone non solo siano in grado di riconoscere l'obiettivo previsto del robot e la causa dell'incapacità in modo più chiaro rispetto ad altri approcci, ma che i nostri movimenti creassero anche un'immagine positiva del robot, ' ha detto Kwon. "Ad esempio, le persone erano più disposte ad aiutare il robot ea collaborare con esso. Ci auguriamo che queste implicazioni positive per la collaborazione uomo-robot contribuiranno a migliorare il modo in cui interagiamo con i robot".
Nel futuro, il metodo sviluppato da Kwon, Huang e Dragan potrebbero aiutare lo sviluppo di robot più comunicativi, migliorare ulteriormente le interazioni tra uomo e macchina. I ricercatori stanno ora pianificando di sviluppare ulteriormente il loro approccio, al fine di generare movimenti per una più ampia varietà di errori di attività.
"Abbiamo preso di mira solo un sottoinsieme di possibili incapacità che il robot può avere, tralasciando altri tipi di guasti, come difetti di percezione, " Ha detto Kwon. "Trovare modi creativi per esprimere diversi tipi di incapacità è una sfida interessante che lasciamo al lavoro futuro".
© 2018 Science X Network