Un nuovo approccio "ambidestro" consente ai robot di afferrare una vasta gamma di oggetti senza addestramento. Credito:Adriel Olmos
L'e-commerce continua ad espandersi e ha raggiunto nuovi livelli durante le ultime festività natalizie. Per soddisfare rapidamente l'enorme volume e la varietà di ordini, aziende come Amazon, Walmart, e Alibaba stanno investendo molto in nuovi magazzini. Per far fronte alla carenza di lavoratori, molte aziende stanno prendendo in considerazione i robot. Però, afferrare in modo affidabile una gamma diversificata di prodotti rimane una grande sfida per la robotica.
In un articolo pubblicato mercoledì, 16 gennaio in Robotica scientifica , ingegneri dell'Università della California, Berkeley presenta un romanzo, approccio "ambidestro" per afferrare una vasta gamma di forme di oggetti senza addestramento.
"Una singola pinza non può gestire tutti gli oggetti, "ha detto Jeff Mahler, un ricercatore post-dottorato presso l'UC Berkeley e autore principale dell'articolo. "Per esempio, una ventosa non può creare un sigillo su oggetti porosi come vestiti e pinze a ganasce parallele potrebbero non essere in grado di raggiungere entrambi i lati di alcuni strumenti e giocattoli."
Mahler lavora nel laboratorio di Ken Goldberg, un professore della UC Berkeley con incarichi congiunti presso il Dipartimento di Ingegneria Elettrica e Informatica e il Dipartimento di Ingegneria Industriale e Ricerca Operativa.
I sistemi robotici utilizzati nella maggior parte dei centri di distribuzione di e-commerce si basano su ventose che possono limitare la gamma di oggetti che possono afferrare. Il documento della UC Berkeley introduce un approccio "ambidestro" compatibile con una varietà di tipi di pinze. L'approccio si basa su una "funzione di ricompensa" comune per ogni tipo di pinza che quantifica la probabilità che ogni pinza abbia successo. Ciò consente al sistema di decidere rapidamente quale pinza utilizzare per ogni situazione. Per calcolare efficacemente una funzione di ricompensa per ogni tipo di pinza, il documento descrive un processo per l'apprendimento delle funzioni di ricompensa mediante l'addestramento su grandi set di dati sintetici generati rapidamente utilizzando la randomizzazione del dominio strutturato e modelli analitici dei sensori e la fisica e la geometria di ciascuna pinza.
Quando i ricercatori hanno addestrato le funzioni di ricompensa per una pinza a ganasce parallele e una pinza a ventosa su un robot a due braccia, hanno scoperto che il loro sistema sgombrava i contenitori con un massimo di 25 oggetti non visti in precedenza a una velocità di oltre 300 prelievi all'ora con un'affidabilità del 95%.
"Quando sei in un magazzino e metti insieme i pacchi per la consegna, gli oggetti variano notevolmente, " ha detto Goldberg. "Abbiamo bisogno di una varietà di pinze per gestire una varietà di oggetti."
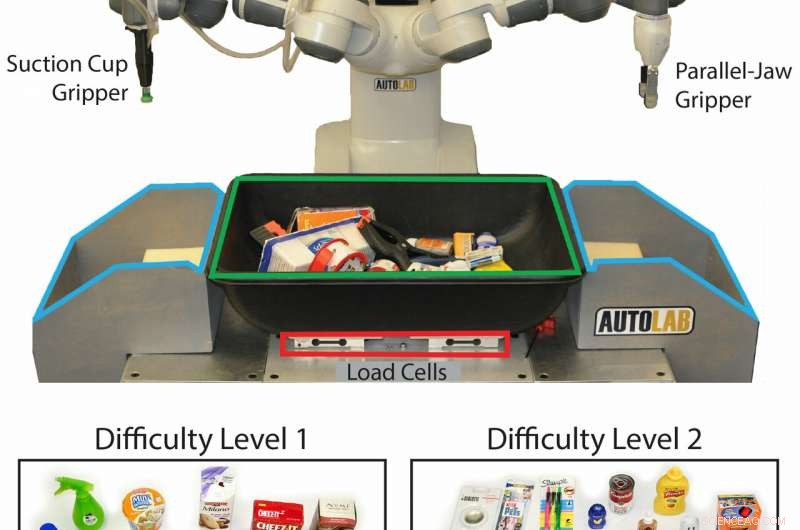
Installazione del robot ambidestro a due braccia e degli oggetti che ha tentato di afferrare, suddivisi in due livelli di difficoltà. Credito:Mahler et al., Sci. Robot. 4, eaau4984 (2019)