pedoni, il robot bipede sviluppato dai ricercatori, attraversare la strada accanto a un utente umano. Credito:Ahmad et al.
Gli esseri umani sono generalmente in grado di adattare il proprio stile di deambulazione in base all'ambiente in cui si muovono, ad esempio, accelerando se la consistenza del terreno sotto i loro piedi lo consente, rallentando quando il pavimento è scivoloso, cambiare direzione per evitare pozzanghere o buche nel terreno, e così via. Per navigare in una varietà di ambienti, i robot dovrebbero essere in grado di adattare il loro comportamento di deambulazione in modo simile, adeguare la propria struttura in risposta ai cambiamenti ambientali.
Con questo in testa, I ricercatori dell'Università di Osaka in Giappone hanno recentemente creato PedestriANS, un robot bipede in grado di modificare alcune delle caratteristiche fisiche e dei movimenti delle gambe in risposta ai cambiamenti dell'ambiente circostante. Questo nuovo robot, presentato in un articolo pubblicato sulla rivista di SAGE Comportamento adattivo , può cambiare il suo stile di camminata utilizzando un semplice sistema che collega i movimenti e la configurazione delle sue due gambe.
"L'obiettivo principale del nostro lavoro è sviluppare robot robusti in grado di gestire i disturbi; robot che possano accompagnare gli esseri umani e camminare efficacemente su terreni uniformi e irregolari come erba e ghiaia, "Huthaifa Ahmad, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Per raggiungere questo obiettivo, abbiamo bisogno di sviluppare sistemi robotici con una morfologia adattiva; perché anche con i robot bipedi più avanzati disponibili in questi giorni, avere un modello preciso sia del corpo del robot che dell'ambiente è fondamentale per il loro corretto funzionamento".
pedoni, il robot sviluppato da Ahmad e dai suoi colleghi, si basa su un sistema di rete di attuatori (ANS), un concetto di design introdotto nel loro lavoro precedente. Nei loro studi precedenti, i ricercatori hanno incorporato lo stesso concetto in diverse altre applicazioni, comprese le spine robotiche, braccia e robot a più gambe.
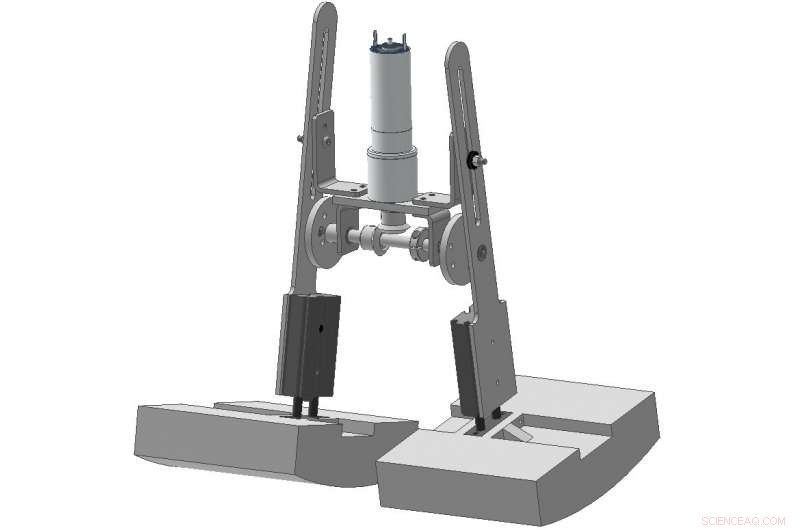
Un'illustrazione dei pedoni. Credito:Ahmad et al.
"Poiché la sua fattibilità è stata dimostrata in diversi studi, Attualmente sto usando il principio ANS nella mia ricerca per realizzare robot adattabili, sfruttando le diverse interazioni tra gli attuatori montati sui loro corpi, "ha detto Ahmad.
I movimenti del robot sviluppato da Ahmad e dai suoi colleghi sono prodotti da un unico motore, e le sue gambe sono collegate tra loro tramite un ANS. Contrariamente ad altri robot bipedi basati su sistemi complessi, PedestriANS ha una struttura abbastanza semplice. Il robot si adatta ai cambiamenti dell'ambiente circostante sfruttando le caratteristiche fisiche delle sue gambe e le interazioni tra i suoi diversi componenti, determinando una serie di diversi comportamenti di deambulazione.
"Il comportamento di camminata del robot cambia cambiando l'interazione tra gli attuatori dell'ANS, " Ahmad ha detto. "Per produrre un comportamento migliore, le richieste del robot per un determinato modello di connessione differiscono in base alla situazione data. Il nostro lavoro suggerisce che il modo migliore per realizzare robot autoadattabili è consentire loro di regolare le loro morfologie e sfruttare le loro dinamiche di tutto il corpo in risposta ai cambiamenti ambientali"

pedoni, il robot bipede sviluppato dai ricercatori. Credito:Ahmad et al.
I ricercatori hanno valutato le prestazioni del loro robot in una serie di esperimenti. in primo luogo, hanno testato come i cambiamenti nella morfologia del robot hanno influenzato il suo comportamento di camminata osservando la sua capacità di adattarsi a diversi materiali del terreno, concentrandosi sui cambiamenti nel suo stile di camminata, stabilità, velocità, e la direzione in cui si è mosso.
Dopo aver analizzato i risultati raccolti in questo primo esperimento, Ahmad e i suoi colleghi hanno aggiornato il design del robot in un modo che gli ha permesso di passare automaticamente attraverso diversi modelli di connessione tra le sue gambe. Hanno quindi condotto una seconda valutazione e hanno riscontrato miglioramenti significativi nel modo in cui il robot ha regolato la sua morfologia durante la locomozione. In questo secondo esperimento, PedestriANS ha prodotto in modo efficace stili di camminata adattabili in risposta all'ambiente in cui operava.
Nel futuro, il robot sviluppato da questo team di ricercatori potrebbe essere utilizzato per completare compiti che comportano spostamenti in ambienti incontrollati e in continuo cambiamento. Mentre i pedoni possono cambiare il tipo di interazione tra le sue gambe per produrre diversi comportamenti di locomozione che meglio si adattano al suo ambiente, non è ancora in grado di individuare autonomamente gli adattamenti morfologici più adatti a situazioni specifiche. I ricercatori hanno in programma di continuare a lavorare sul robot per abilitare questa importante capacità, che è necessario affinché il robot funzioni senza il continuo input e guida dell'uomo.
"Il prossimo passo nella nostra ricerca sarà realizzare un sistema di controllo che possa consentire al robot di continuare a fornire le migliori prestazioni durante tutte le fasi di locomozione, selezionando autonomamente un modello di connessione adeguato, " Ahmad ha detto. "Inoltre, estendendo l'ANS per includere più parti del robot (ad es. Torace), questo aumenterà i possibili cambiamenti morfologici, che a sua volta si riflette sull'adattabilità del robot."
© 2020 Scienza X Rete