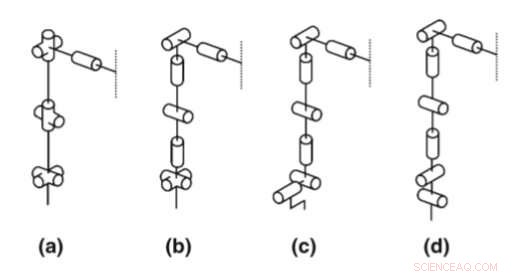
Visualizzazione della configurazione dell'articolazione del braccio destro di un numero di robot con 7 bracci DOF. La linea tratteggiata rappresenta la linea mediana del corpo. un ASIMO, b ARMAR-III, c WABIAN-2, d iCub Credito:Van de Perre et al.
I robot sociali sono progettati per comunicare con gli esseri umani in modo naturale, assistendoli in una serie di compiti. L'uso efficace dei gesti potrebbe migliorare notevolmente le interazioni uomo-robot, consentendo ai robot di comunicare sia verbalmente che non verbalmente.
Il design della maggior parte dei social robot è ispirato al corpo umano, poiché ciò rende più facile replicare gesti e comportamenti simili a quelli umani. Però, robot diversi possono avere morfologie diverse, che consentono loro di affrontare al meglio i compiti che sono progettati per completare.
Ricercatori della Vrije Universiteit Brussel, in Belgio, hanno recentemente introdotto un nuovo approccio basato su un metodo gestuale generico per studiare l'influenza di diversi aspetti del design. La loro carta, pubblicato su Springer's Rivista internazionale di robotica sociale , presenta un framework che genera rapidamente gesti che corrispondono alla configurazione specifica di un robot.
"In questo documento, proponiamo una nuova metodologia per studiare l'influenza di diversi aspetti del design basata su un metodo gestuale generico, " hanno scritto i ricercatori nel loro articolo. "Il metodo dei gesti è stato sviluppato per superare le difficoltà nel trasferire i gesti a diversi robot, fornendo una soluzione per il problema della corrispondenza."
Il metodo ideato da questo team di ricercatori potrebbe superare le difficoltà nel trasferire i gesti a robot di diverse forme e configurazioni. Gli utenti possono inserire le informazioni morfologiche di un robot e lo strumento utilizzerà questi dati per calcolare i gesti per quel robot.
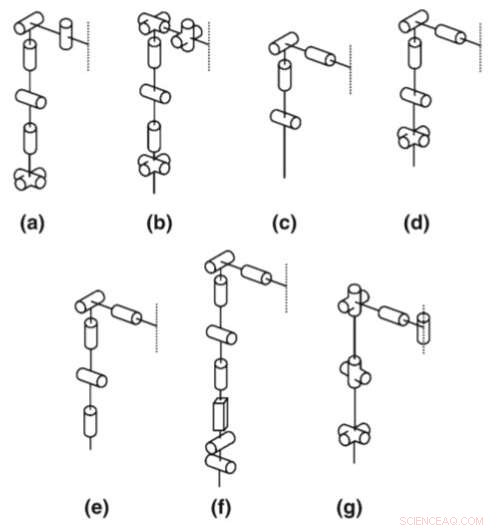
Visualizzazione della configurazione dell'articolazione del braccio destro di un numero di robot con diverse morfologie del braccio. La linea tratteggiata rappresenta la linea mediana del corpo. un Pirenei, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Credito:Van de Perre et al.
"Un piccolo insieme di informazioni morfologiche, inserito dall'utente, viene utilizzato per valutare il framework generico del software in fase di esecuzione, " hanno spiegato i ricercatori. "Pertanto, i gesti possono essere calcolati rapidamente e facilmente per la configurazione del robot desiderata. Generando un insieme di gesti per diverse morfologie, si può studiare l'importanza di specifiche articolazioni e la loro influenza su una serie di posture e gesti."
Per garantire che il loro metodo fosse applicabile a diversi tipi di robot, i ricercatori hanno tratto ispirazione da un modello di base umana. Questo modello è composto da diverse catene e blocchi, che vengono utilizzati per modellare le varie possibilità di rotazione degli esseri umani. I ricercatori hanno assegnato un quadro di riferimento a ciascun blocco articolare utilizzando il modello di base umana come riferimento per costruire il quadro generale alla base del loro metodo.
"Per generare gesti per un determinato modello di robot, il metodo utilizza come input i parametri Denavit-Hartenberg (DH) della configurazione, per cui i diversi giunti del robot sono raggruppati in catene e blocchi del modello base umana, " hanno spiegato i ricercatori nel loro articolo. "In fase di esecuzione, il quadro generico del metodo viene valutato utilizzando queste informazioni, e come tale, adattato al robot in esame."
Poiché le diverse caratteristiche sono importanti per i diversi tipi di gesti, il metodo ideato dai ricercatori è progettato per funzionare in due diverse modalità, vale a dire la modalità blocco e la modalità effettore finale. La modalità blocco viene utilizzata per calcolare gesti come le espressioni emotive nei casi in cui il posizionamento complessivo del braccio è cruciale. La modalità dell'effettore finale, d'altra parte, calcola i gesti in situazioni in cui la posizione dell'end-effector è importante, come durante la manipolazione o il puntamento di oggetti.
"Il metodo dei gesti dimostra la sua utilità nel processo di progettazione dei robot sociali fornendo un'impressione della necessaria quantità di complessità necessaria per un compito specifico, e può fornire spunti interessanti nell'intervallo di angoli di giunzione richiesto, " hanno detto i ricercatori.
Nel loro studio, i ricercatori hanno applicato il loro metodo al modello virtuale di un robot chiamato Probo. Hanno usato questo esempio per illustrare come il loro metodo potrebbe aiutare a studiare la collocazione di diverse articolazioni e intervalli di angoli articolari nei gesti. Nel futuro, il loro approccio potrebbe aiutare lo sviluppo di robot sociali in grado di eseguire gesti naturali adatti alla loro morfologia e applicazione.
© 2019 Scienza X Rete














