Credito:Università di Harvard
Cattive notizie per gli ofiofobi:i ricercatori della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) hanno sviluppato un nuovo e migliorato robot morbido ispirato al serpente, più veloce e più preciso del suo predecessore.
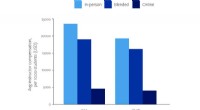
Il robot è realizzato utilizzando il kirigami, un mestiere di carta giapponese che si basa sui tagli per modificare le proprietà di un materiale. Mentre il robot si allunga, la superficie del kirigami "si apre" in una superficie strutturata in 3-D, che attanaglia il terreno proprio come la pelle di serpente.
Il robot di prima generazione utilizzava un foglio kirigami piatto, che si trasformava uniformemente quando si allungava. Il nuovo robot ha un guscio programmabile, il che significa che i tagli kirigami possono apparire come desiderato, migliorare la velocità e la precisione del robot.
La ricerca è stata pubblicata su Atti dell'Accademia Nazionale delle Scienze .
"Questo è un primo esempio di struttura kirigami con deformazioni pop-up non uniformi, "ha detto Ahmad Rafsanjani, un borsista post-dottorato presso SEAS e primo autore del documento. "In kirigami piatto, il pop-up è continuo, il che significa che tutto si apre in una volta. Ma nel guscio del kirigami, il pop up è discontinuo. Questo tipo di controllo della trasformazione della forma potrebbe essere utilizzato per progettare superfici reattive e skin intelligenti con cambiamenti su richiesta nella loro consistenza e morfologia".
La nuova ricerca ha combinato due proprietà del materiale:la dimensione dei tagli e la curvatura del foglio. Controllando queste caratteristiche, i ricercatori sono stati in grado di programmare la propagazione dinamica dei pop-up da un'estremità all'altra, o controllare i popup localizzati.
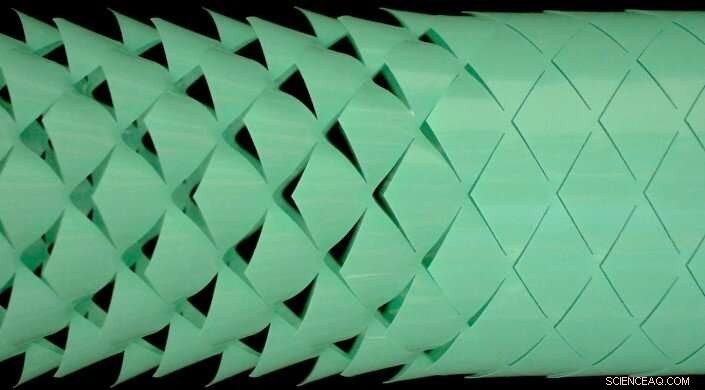
In precedenti ricerche, un foglio di kirigami piatto è stato avvolto attorno a un attuatore in elastomero. In questa ricerca, la superficie del kirigami viene arrotolata in un cilindro, con un attuatore che applica forza alle due estremità. Se i tagli sono di dimensioni consistenti, la deformazione si propaga da un'estremità all'altra del cilindro. Però, se le dimensioni dei tagli sono scelte con cura, la pelle può essere programmata per deformarsi nelle sequenze desiderate.
Questo è un robot morbido ispirato al serpente nuovo e migliorato che è più veloce e più intelligente del suo predecessore. Credito:Harvard SEAS
"Prendendo in prestito idee da materiali a trasformazione di fase e applicandole a materiali architettonici ispirati al kirigami, abbiamo dimostrato che sul cilindro possono coesistere contemporaneamente sia la fase spuntata che quella non spuntata, "ha detto Katia Bertoldi, William e Ami Kuan Danoff Professore di Meccanica Applicata presso SEAS e autore senior dell'articolo. "Semplicemente combinando tagli e curvature, possiamo programmare comportamenti notevolmente diversi."
Prossimo, i ricercatori mirano a sviluppare un modello di progettazione inversa per deformazioni più complesse.
"L'idea è se sai come vorresti che la pelle si trasformasse, puoi semplicemente tagliare, rotola e vai, " disse Lishuai Jin, uno studente laureato presso SEAS e coautore dell'articolo.