Credito:Chen et al.
Nanogeneratori, strumenti tecnologici in grado di convertire energia meccanica o termica in energia elettrica, sono disponibili in tre modelli chiave:piezoelettrico, triboelettrico e piroelettrico. Mentre i nanogeneratori piezoelettrici e triboelettrici possono convertire l'energia meccanica in elettricità, quelli piroelettrici funzionano raccogliendo energia termica.
Negli ultimi anni, i nanogeneratori triboelettrici sono diventati sempre più popolari sia per la raccolta di energia che per le applicazioni di rilevamento. Finora, però, le loro prestazioni nella percezione delle informazioni multidimensionali e nei compiti di controllo interattivo sono state piuttosto deludenti.
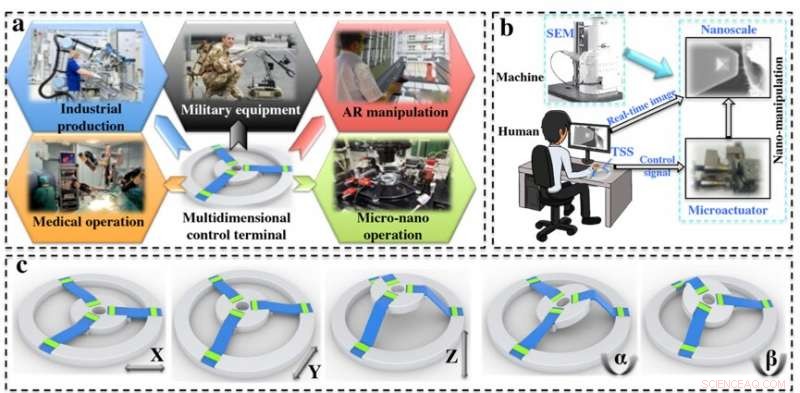
I ricercatori della National University of Singapore hanno recentemente sviluppato sensori per il controllo di oggetti nello spazio 3D basati su nanogeneratori triboelettrici. Questi sensori, presentato in un articolo pubblicato in Nano energia , sono costituiti da una struttura parallela con tre strisce sensori simmetriche fissate sulla sua base e un palco mobile ad esse collegato.
"Con lo sviluppo della scienza, le tecnologie dell'automazione e della robotica sono penetrate in molti aspetti delle attività umane, "Tao Chen, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "I robot non sono solo ampiamente utilizzati nelle linee di produzione automatiche e nei campi dell'intrattenimento, ma può anche avere cure mediche, applicazioni aerospaziali e militari, così come molti altri. Però, ci sono inaccessibili, sfide imprevedibili pericolose o inevitabili per gli esseri umani nell'interazione o nell'esecuzione di compiti complessi in ambienti in cui le apparecchiature vengono mantenute nel vuoto, sottomarino, spazio e scala nanometrica, eccetera."
Per consentire interazioni efficaci tra esseri umani e sistemi automatizzati, i ricercatori hanno sviluppato terminali di controllo che possono essere azionati in vari modi, come schermi tattili, tastiere o strutture a bilanciere. Nella maggior parte dei casi, questi meccanismi di controllo sono indiretti, quindi hanno bisogno di analisi e calcoli di istruzioni complesse per corrispondere allo stato di movimento dell'oggetto da manipolare.
"In questo documento, presentiamo un sensore a striscia triboelettrica ultra-estensibile (TSS) per il controllo degli atteggiamenti dell'oggetto nello spazio, " Ha spiegato Chen. "Il nostro TSS potrebbe migliorare le prestazioni dei robot in una varietà di ambienti, compreso sottomarino, spazio e altro."
Nel loro studio, Chen e i suoi colleghi hanno usato una striscia tribolelettrica ultra estensibile come sensore spaziale, che alla fine consente ai robot di controllare gli oggetti nello spazio 3D. A causa dell'effetto di accoppiamento della triboelettrificazione e dell'induzione elettrostatica, la lunghezza della striscia cambia, con lo stesso punto di contatto del dito che genera diversi rapporti di uscita del segnale da due elettrodi terminali (E1 ed E2). Questi elettrodi funzionano come interfaccia interattiva per il rilevamento e il controllo multidimensionali.
"Un'estremità dell'elettrodo E1 della striscia è fissa, mentre l'elettrodo E2 è mobile sotto sforzo di trazione rispetto a E1, " Chen ha detto. "Il rapporto di tensione di uscita dei due elettrodi (VE2/VE1) è ottenuto durante il contatto e la separazione del dito e della gomma di silicone a distanza costante da E1. Per di più, la striscia è allungata di una certa lunghezza, il decremento del rapporto di tensione è determinato mentre ritocchiamo la stessa posizione (punto di riferimento) a distanza costante rispetto all'elettrodo E1."
All'aumentare della lunghezza di stiramento della striscia, questo rapporto di tensione diminuisce. Il meccanismo utilizzato da Chen e dai suoi colleghi ha permesso loro di misurare la lunghezza estesa del lato E2 della striscia, toccando il punto di riferimento fissato da E1. In altre parole, lo spostamento della loro striscia mentre è tesa, la sua velocità di stiramento e l'accelerazione dell'elettrodo E2 possono essere misurate con una frequenza di contatto costante.
"Il principio di rilevamento del sensore utilizzato qui è principalmente quello di determinare la lunghezza confrontando il rapporto di tensione tra i due elettrodi, " Chen ha detto. "Di conseguenza, il meccanismo di rilevamento che utilizza il metodo del rapporto di tensione evita l'influenza dell'umidità ambientale e della forza irregolare. Così, questo è un metodo di rilevamento efficace per evitare instabilità e interferenze".
Chen e i suoi colleghi hanno introdotto un nuovo metodo di rilevamento degli oggetti basato su un sensore di movimento longitudinale che utilizza rapporti di tensione generati. Nel loro studio, hanno utilizzato tre sensori flessibili autoalimentati per ottenere una proiezione di posizionamento 5D nello spazio. Il loro metodo è più semplice e intuitivo rispetto alle tradizionali strutture rigide (non estensibili), ma aggiunge anche dimensioni spaziali.
"Attualmente, il funzionamento della nanoscala utilizzando la modalità maniglia o chiave non è intuitivo, " Ha detto Chen. "Il nostro approccio può essere più flessibile e intuitivo per le interazioni uomo-macchina su scala nanometrica".
In una dimostrazione preliminare, i ricercatori hanno usato il loro dispositivo TSS come terminale di una nanomacchina per controllare il loro nanomanipolatore in un compito di microscopia elettronica a scansione (SEM). In questo compito, il loro dispositivo ha permesso loro di far funzionare i nanotubi di carbonio e completare con successo l'estrazione dei nanotubi di carbonio.
"I risultati della manipolazione micro-nano che abbiamo raccolto confermano le eccellenti prestazioni del dispositivo TSS su applicazioni percettive e di controllo, che sono rilevanti per campi come la robotica, VR e IoT, " Chen ha detto. "In uno studio di follow-up, abbiamo in programma di effettuare ricerche sul controller a due mani, per ottenere un'interazione uomo-macchina più intuitiva e conveniente."
© 2019 Scienza X Rete