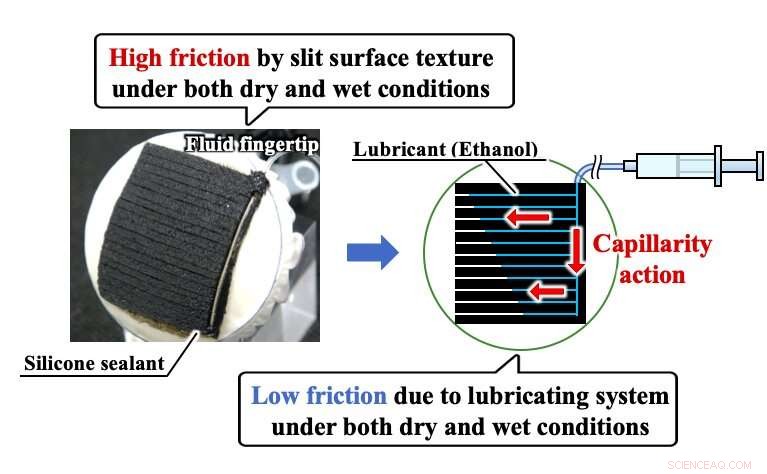
Un'illustrazione del concetto di polpastrello fluido dei ricercatori. Credito:Mizushima et al.
I ricercatori della Kanazawa University hanno recentemente sviluppato un sistema di riduzione dell'attrito basato su un effetto lubrificante, che potrebbe avere interessanti applicazioni di robotica morbida. Il loro sistema, presentato in un articolo pubblicato su Taylor &Francis' Robotica avanzata rivista, potrebbe aiutare lo sviluppo di robot in grado di manipolare in modo efficiente gli oggetti sia in condizioni asciutte che umide.
"La nostra struttura superficiale o pelle precedentemente sviluppata per le morbide mani robotiche fornisce un elevato attrito sia in condizioni asciutte che bagnate, "Tetsuyou Watanabe, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Però, questo elevato attrito rende difficili diversi stili di manipolazione (inclusi il rilascio e lo scorrimento). In alcuni casi, un oggetto afferrato si attacca alla superficie. Per superare questo problema, abbiamo sviluppato un nuovo sistema di riduzione dell'attrito che utilizza lubrificanti."
Durante lo sviluppo del loro sistema, Watanabe e i suoi colleghi hanno tratto ispirazione dal comportamento umano. Hanno osservato che nei supermercati le persone spesso si leccano le dita per aprire sacchetti o contenitori di plastica. Azioni simili vengono eseguite anche quando si cerca di raccogliere fogli di carta o girare le pagine di un libro.
I ricercatori hanno scoperto che questo comportamento di "leccarsi le dita" è particolarmente comune nelle persone di mezza età o anziane, poiché l'invecchiamento in genere porta a una pelle più secca. I più giovani, d'altra parte, spesso non è necessario leccarsi le dita quando si cerca di manipolare plastica o carta, perché possono controllare automaticamente l'attrito della pelle attraverso i meccanismi del sudore del loro corpo.
"Certo, lo scopo di leccarsi le dita è ottenere un attrito elevato, e totalmente diverso dal nostro scopo (cioè la riduzione dell'attrito), " ha detto Watanabe. "Tuttavia, normalmente lo scopo dei lubrificanti è ridurre l'attrito nei sistemi meccanici. Così, abbiamo considerato la possibilità di un sistema di riduzione dell'attrito simile al controllo del sudore negli esseri umani".
I ricercatori hanno costruito un polpastrello robotico con delle fessure sulla superficie. Quando i lubrificanti (ad es. etanolo) vengono iniettati attorno ai confini di queste fessure, permeano tutta la superficie, tramite un'azione capillare.
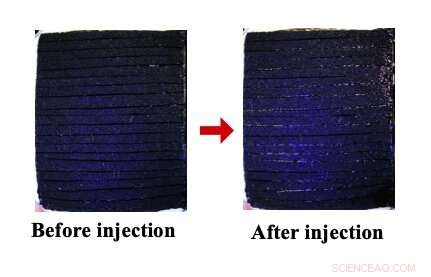
Il polpastrello prima e dopo l'iniezione di etanolo. Credito:Mizushima et al.
"Abbiamo utilizzato la superficie sottile, compresa la trama, e il sistema lavora su corpi non solo rigidi ma anche deformabili senza perdita di adattabilità alla forma di un oggetto, " disse Watanabe. "Pertanto, il vantaggio principale del nostro sistema è che l'attrito superficiale può essere controllato mantenendo la deformabilità e l'adattabilità della superficie. Ciò significa che il sistema sviluppato può essere collegato a robot con corpi morbidi".
Negli ultimi anni, l'uso di corpi morbidi è diventato sempre più popolare nella robotica, per la loro elevata deformabilità e adattabilità. Ad esempio, i robot morbidi possono muoversi più liberamente nell'ambiente circostante, senza presentare danni ingenti quando si colpisce muri o ostacoli. Inoltre, morbide mani robotiche possono adattarsi alla forma di un oggetto mentre lo afferrano, che consente strategie di manipolazione più avanzate.
"Un altro vantaggio chiave del nostro sistema è che funziona sia in condizioni asciutte che bagnate, " ha aggiunto Watanabe. "È quindi molto utile per i robot che lavorano in ambienti umani, perché i lavori domestici vengono eseguiti in entrambe queste condizioni."
I ricercatori hanno incorporato il loro sistema in un polpastrello robotico e ne hanno valutato le prestazioni in una serie di esperimenti che prevedevano la presa e il rilascio di oggetti. I loro risultati suggeriscono che la tecnica di lubrificazione che hanno sviluppato può ridurre efficacemente l'attrito in condizioni sia umide che asciutte.
"Come puoi immaginare dal comportamento umano di leccarsi le dita, l'acqua può aumentare l'attrito e in alcuni casi permettere alla pelle di aderire alle superfici, " ha detto Watanabe. "Al contrario, l'etanolo riduce l'attrito. Il fattore importante per la riduzione dell'attrito è il coefficiente di diffusione strettamente associato alle forze capillari (cioè la tensione superficiale)."
In tale contesto, una bassa forza capillare comporta la facile diffusione del liquido su una superficie. Usando etanolo, che ha una forza capillare bassa, i ricercatori sono stati in grado di ridurre l'attrito e diffondere facilmente il lubrificante su tutta la superficie del polpastrello. Un ulteriore vantaggio dell'etanolo è la sua elevata volatilità, che riduce notevolmente il tempo di tatto.
"Abbiamo anche osservato che per facilitare il funzionamento del nostro sistema, la superficie non deve essere completamente liscia, " ha aggiunto Watanabe. "Una superficie un po' ruvida o irregolare può migliorare ulteriormente la sua funzione."
I robot potrebbero presto supportare gli esseri umani in una varietà di ambienti, per esempio aiutandoli con i lavori domestici o fornendo assistenza infermieristica. Poiché queste attività vengono generalmente eseguite in condizioni sia asciutte che umide, il sistema di riduzione dell'attrito dei ricercatori potrebbe rivelarsi molto utile.
"La manipolazione e la manipolazione di oggetti sono gli obiettivi principali della nostra ricerca e quindi i compiti che includono tali azioni sono le applicazioni mirate, " ha detto Watanabe. "Alcuni esempi sono piegare i vestiti, cucinando, lavaggio, eccetera."
Nel futuro, il sistema di lubrificazione sviluppato da Watanabe e dai suoi colleghi potrebbe informare lo sviluppo di robot morbidi in grado di manipolare gli oggetti in modo più efficace, sia in ambienti asciutti che umidi. I ricercatori stanno ora pianificando ulteriori ricerche volte a delineare e ampliare le possibili applicazioni del loro sistema.
"Attualmente, abbiamo combinato solo i polpastrelli con il nostro sistema, " ha detto Watanabe. "Come passo successivo, vorremmo applicare il nostro sistema di controllo dell'attrito a una mano robotica. Inoltre, le applicazioni per il sistema non sono ancora chiare, quindi vorremmo delineare metodologie appropriate per operazioni reali, come piegare o cucinare."
© 2019 Scienza X Rete