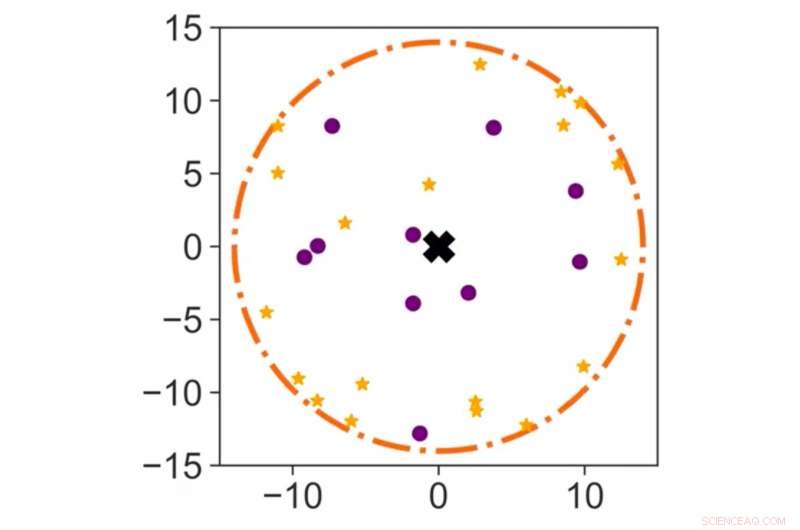
Credito:Obute, Dogar &Boyle.
Molti animali e microrganismi sono in grado di svolgere compiti complessi, come trovare cibo o costruire nidi, come una squadra, o "sciame". Uno degli esempi più evidenti di ciò sono le api, poiché la loro sopravvivenza come gruppo dipende fortemente dalla cooperazione con altri membri della loro colonia. Negli ultimi anni, un numero crescente di ricercatori ha cercato di riprodurre queste affascinanti dinamiche di gruppo nei robot, dando origine a un'area di studio chiamata swarm robotics.
I ricercatori dell'Università di Leeds hanno recentemente presentato un nuovo approccio robotico a sciame chiamato chemiotassi, ispirato da un particolare comportamento osservato nei microrganismi, . Il loro studio, pre-pubblicato su arXiv, deriva dall'interesse degli autori per la sopravvivenza di semplici animali invertebrati in ambienti dinamici del mondo reale, e come queste strategie possono essere applicate ai robot.
"Durante il mio dottorato di ricerca e la prima borsa di studio post-dottorato, Ho studiato il sistema di locomozione di un piccolo verme chiamato C. elegans (un popolare organismo modello), e ho applicato con successo ciò che ho imparato per controllare la locomozione di un robot simile a un serpente, "Giordania Boyle, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Il lavoro attuale si ispira allo stesso organismo, ma questa volta, guardando il suo comportamento di livello superiore, in particolare il modo in cui naviga verso le fonti di cibo usando il suo senso dell'olfatto".
In assenza di input sensoriali, C. elegans i vermi di solito si muovono in avanti, ma fai grandi svolte a intervalli di tempo casuali. Se percepiscono che un odore "positivo" sta diventando più forte mentre si muovono in una particolare direzione, la frequenza dei loro giri diminuisce. Inversamente, quando l'odore "positivo" o "desiderato" diventa più debole, c'è una maggiore probabilità che si trasformino. Questo comportamento, noto come chemiotassi, in definitiva consente loro di gravitare verso luoghi in cui uno stimolo sensoriale desiderato è al suo apice. Nel loro studio, Boyle, il suo collega Mehmet Dogar e Ph.D. lo studente Simon Obute ha deciso di replicare questa strategia di gruppo in sciami robotici e valutarne l'utilità.
"Un vantaggio chiave di questa strategia è che necessita di un solo sensore analogico, perché i gradienti vengono rilevati nel tempo mentre l'animale si muove, " ha spiegato Boyle. "Nel nostro lavoro, abbiamo sostituito l'odore con il suono, perché è molto più facile creare e percepire con un robot, e si indebolisce man mano che ci si allontana dalla fonte, " ha spiegato Boyle. "I vantaggi chiave di questo approccio è che consente a un gruppo di robot sciame di essere confinato in un'area specifica (cioè intorno a una sorgente sonora) senza bisogno di un confine fisico, capacità di mappatura o sistemi sensoriali complessi."
Utilizzando un algoritmo che hanno sviluppato, i ricercatori hanno applicato la chemiotassi a uno sciame di robot esplorativi, alla fine spingendoli a tornare in una determinata area di lavoro intorno al loro nido situato in un ambiente illimitato. Hanno testato le loro prestazioni, e quindi l'efficacia del loro approccio, in una serie di esperimenti di simulazione e validazione hardware. Sebbene i loro risultati siano principalmente basati su simulazioni e non su implementazioni del mondo reale, i ricercatori hanno scoperto di essere riusciti a incorporare modelli accurati di propagazione del suono.
"I nostri risultati hardware sono preliminari ma promettenti a questo punto, " ha detto Boyle. "In definitiva, questo lavoro potrebbe essere rilevante per sciami fisici costituiti da piccolissimi, robot economici con capacità sensoriali e computazionali limitate. Mentre pratico, Il dispiegamento nel mondo reale di sciami di robot è ancora lontano, hanno potenziale in molte applicazioni."
Nel futuro, esperimenti con robot reali potrebbero aiutare ad accertare l'efficacia di questo nuovo approccio bio-ispirato. Se questi test danno risultati positivi, l'algoritmo sviluppato da Boyle e dai suoi colleghi potrebbe eventualmente essere utilizzato per migliorare le strategie di navigazione e orientamento degli sciami robotici, in particolare quando gli ambienti in cui stanno navigando non sono chiaramente mappati o definiti.
Obute sta ora lavorando per integrare la chemiotassi in sistemi robotici a sciame più complessi, nelle simulazioni così come in alcuni esperimenti hardware. Il suo dottorato di ricerca finale. Il progetto studia in modo specifico la possibilità di utilizzare i robot dello sciame per la raccolta dei rifiuti urbani. Boyle, d'altra parte, prevede di continuare a esplorare strategie biologiche che potrebbero rivelarsi particolarmente utili per le applicazioni della robotica.
"Attualmente, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Scienza X Rete