Sviluppo di una piattaforma sperimentale ad alta frequenza che esplora lo spazio delle prestazioni dei pesci che nuotano. Credito:Haibo Dong
Ingegneri meccanici presso la University of Virginia School of Engineering, conducendo una collaborazione con i biologi dell'Università di Harvard, hanno creato il primo pesce robotico che ha dimostrato di imitare la velocità e i movimenti del tonno pinna gialla vivo.
Il loro documento sottoposto a revisione paritaria, "La robotica del tonno:una piattaforma sperimentale ad alta frequenza che esplora lo spazio delle prestazioni dei pesci che nuotano, " è stato pubblicato il 18 settembre 2019, in Robotica scientifica .
Guidati da Hilary Bart-Smith, professore presso il Dipartimento di Ingegneria Meccanica e Aerospaziale dell'UVA Engineering, il progetto del tonno robot è nato da un quinquennio, $ 7,2 milioni di iniziativa di ricerca universitaria multidisciplinare l'Ufficio per la ricerca navale degli Stati Uniti ha assegnato a Bart-Smith lo studio rapido, nuoto efficiente di diversi pesci. Lo scopo del progetto di Bart-Smith è comprendere meglio la fisica della propulsione dei pesci, ricerca che potrebbe eventualmente informare lo sviluppo della prossima generazione di veicoli sottomarini, guidati da sistemi simili a pesci migliori delle eliche.
I robot subacquei sono utili anche in una vasta gamma di applicazioni, come la difesa, esplorazione delle risorse marine, ispezione e ricreazione delle infrastrutture.
Ben prima che i sistemi di propulsione ispirati alla bioedilizia possano diventare praticabili per l'uso pubblico e commerciale in veicoli con e senza equipaggio, però, i ricercatori devono essere in grado di capire in modo affidabile come i pesci e altre creature si muovono nell'acqua.
"Il nostro obiettivo non era solo quello di costruire un robot. Volevamo davvero capire la scienza del nuoto biologico, " Bart-Smith ha detto. "Il nostro obiettivo era quello di costruire qualcosa su cui potessimo testare ipotesi in termini di ciò che rende i nuotatori biologici così veloci ed efficienti".
Il team aveva prima bisogno di studiare la meccanica biologica dei nuotatori ad alte prestazioni. Il professore di biologia di Harvard George V. Lauder e il suo team di ricercatori hanno misurato con precisione le dinamiche di nuoto del tonno pinna gialla e dello sgombro. Usando quei dati, Bart-Smith e il suo team, scienziato ricercatore Jianzhong "Joe" Zhu e Ph.D. studente Carl White, costruì un robot che non solo si muoveva come un pesce sott'acqua, ma batteva la coda abbastanza velocemente da raggiungere velocità quasi equivalenti.
Hanno quindi confrontato il robot che hanno chiamato "Tunabot" con esemplari vivi.
"Ci sono molti documenti sui robot pesce, ma la maggior parte di loro non contiene molti dati biologici. Quindi penso che questo documento sia unico nella qualità sia del lavoro robotico che dei dati biologici sposati insieme in un unico documento, " ha detto Lauder.
"Ciò che è così fantastico con i risultati che presentiamo nel documento sono le somiglianze tra la biologia e la piattaforma robotica, non solo in termini di cinematica del nuoto, ma anche in termini di rapporto tra velocità e frequenza dei colpi di coda e prestazioni energetiche, " Bart-Smith ha detto. "Questi confronti ci danno fiducia nella nostra piattaforma e nella sua capacità di aiutarci a capire di più sulla fisica del nuoto biologico".
Il lavoro del team si basa sui punti di forza di UVA Engineering nei sistemi autonomi. Il Dipartimento di Ingegneria Meccanica e Aerospaziale partecipa al Link Lab di UVA Engineering per i sistemi cyber-fisici, che punta sulle smart city, salute intelligente e sistemi autonomi, compresi i veicoli autonomi.
Il progetto Tunabot è una conseguenza del secondo progetto di Bart-Smith, Iniziativa di ricerca universitaria multidisciplinare altamente competitiva dell'Ufficio di ricerca navale; nel 2008, Bart-Smith ha ricevuto un premio di $ 6,5 milioni per sviluppare un robot subacqueo modellato su una manta.
I test di Tunabot si svolgono in un grande laboratorio nell'edificio di ingegneria meccanica e aerospaziale presso UVA Engineering, in un serbatoio di flusso che occupa circa un quarto della stanza, e all'Università di Harvard in una struttura simile. il senza occhi, il pesce replica senza fine è lungo circa 10 pollici; l'equivalente biologico può raggiungere i sette piedi di lunghezza. Una corda da pesca tiene fermo il robot, mentre una luce laser verde taglia la linea mediana del pesce di plastica. Il laser misura il movimento fluido emesso dal robot ad ogni movimento della sua coda fabbricata. Man mano che la corrente d'acqua nel serbatoio di flusso aumenta, la coda e tutto il corpo del Tunabot si muovono in un rapido schema di piegatura, simile al modo in cui nuota un tonno pinna gialla vivo.
"Vediamo finora nella letteratura sulla robotica dei pesci che ci sono sistemi davvero fantastici che altri hanno realizzato, ma i dati sono spesso incoerenti in termini di selezione e presentazione delle misurazioni. È solo lo stato attuale del campo della robotica al momento. Il nostro articolo sul Tunabot è significativo perché i nostri dati completi sulle prestazioni fissano l'asticella molto in alto, " ha detto il Bianco.
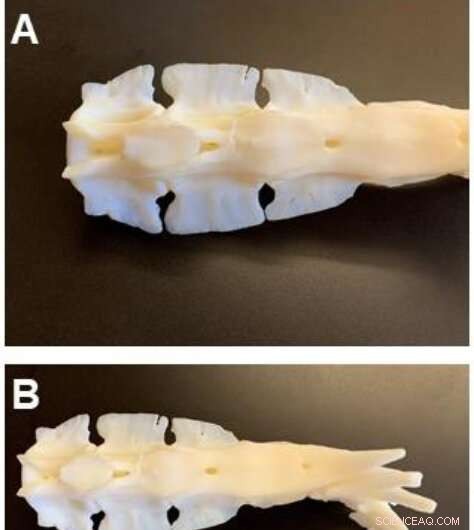
Stampe 3D dello scheletro del peduncolo caudale (l'area in cui si attacca la pinna caudale) in un tonno bianco. Credito:Zhu et al., Sci. Robot. 4, eaax4615 (2019)
Il rapporto tra biologia e robotica è circolare, ha detto Lauder. "Un motivo per cui penso che abbiamo un programma di ricerca di successo in questo settore è dovuto alla grande interazione tra biologi e roboticisti". Ogni scoperta in un ramo informa l'altro, un tipo di ciclo di feedback educativo che fa avanzare costantemente sia la scienza che l'ingegneria.
"Non presumiamo che la biologia si sia evoluta verso la soluzione migliore, " ha detto Bart-Smith. "Questi pesci hanno avuto molto tempo per evolversi verso una soluzione che consente loro di sopravvivere, nello specifico, mangiare, riprodursi e non essere mangiati. Non vincolato da questi requisiti, possiamo concentrarci esclusivamente su meccanismi e caratteristiche che promuovono prestazioni più elevate, maggiore velocità, maggiore efficienza. Il nostro obiettivo finale è superare la biologia. Come possiamo costruire qualcosa che assomigli alla biologia ma nuoti più velocemente di qualsiasi cosa tu veda nell'oceano?"