Credito:Università di Bristol
In una nuova svolta nella ricerca uomo-robot, gli scienziati informatici dell'Università di Bristol hanno sviluppato un robot portatile che prima prevede e poi frustra gli utenti ribellandosi ai loro piani, dimostrando così una comprensione dell'intenzione umana.
In un mondo sempre più tecnologico, la cooperazione tra uomo e macchina è un aspetto essenziale dell'automazione. Questa nuova ricerca mostra che frustrare le persone di proposito fa parte del processo di sviluppo di robot che cooperano meglio con gli utenti.
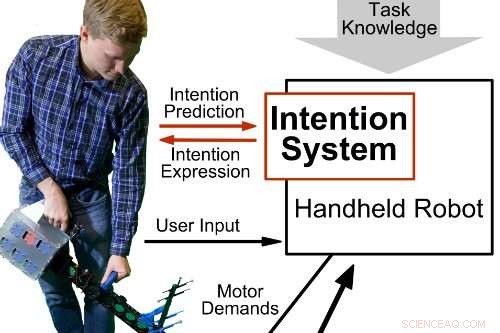
Il team di Bristol ha sviluppato intelligente, robot palmari che completano le attività in collaborazione con l'utente. A differenza degli elettroutensili convenzionali, che non sanno nulla delle attività che svolgono e sono completamente sotto il controllo degli utenti, il robot portatile possiede la conoscenza del compito e può aiutare attraverso la guida, movimento e decisioni precisi sulle sequenze di attività.
Sebbene ciò aiuti a svolgere le attività più rapidamente e con maggiore precisione, gli utenti possono irritarsi quando le decisioni del robot non sono in linea con i propri piani.
Ultime ricerche in questo spazio di Ph.D. candidato Janis Stolzenwald e il professor Walterio Mayol-Cuevas, dal Dipartimento di Informatica dell'Università di Bristol, esplora l'uso di strumenti intelligenti che possono influenzare le loro decisioni in risposta all'intenzione degli utenti.
Questa ricerca è una svolta nuova e interessante sulla ricerca uomo-robot in quanto mira a prevedere prima cosa vogliono gli utenti e poi andare contro questi piani.
Il professor Mayol-Cuevas ha dichiarato:"Se sei frustrato con una macchina che dovrebbe aiutarti, questo è più facile da identificare e misurare rispetto ai segnali spesso sfuggenti della cooperazione uomo-robot. Se l'utente è frustrato quando insegniamo al robot a ribellarsi ai suoi piani, sappiamo che il robot ha capito cosa voleva fare."
"Proprio come le previsioni a breve termine delle azioni degli altri sono essenziali per il successo del lavoro di squadra umano, la nostra ricerca mostra che l'integrazione di questa capacità in sistemi robotici cooperativi è essenziale per il successo della cooperazione uomo-macchina".
Per lo studio, i ricercatori hanno utilizzato un prototipo in grado di tracciare lo sguardo dell'occhio dell'utente e ricavare previsioni a breve termine sulle azioni previste attraverso l'apprendimento automatico. Questa conoscenza viene quindi utilizzata come base per le decisioni del robot, come ad esempio dove muoversi.
Il team di Bristol ha addestrato il robot nello studio utilizzando una serie di oltre 900 esempi di formazione da un'attività pick and place svolta dai partecipanti.
Il nucleo di questa ricerca è la valutazione del modello di previsione dell'intenzione. I ricercatori hanno testato il robot per due casi:obbedienza e ribellione. Il robot è stato programmato per seguire o disobbedire all'intenzione prevista dell'utente. Conoscere gli obiettivi dell'utente ha dato al robot il potere di ribellarsi alle sue decisioni. La differenza nelle risposte alla frustrazione tra le due condizioni è servita come prova dell'accuratezza delle previsioni del robot, convalidando così il modello intenzione-previsione.
Janis Stolzenwald, un dottorato di ricerca studente sponsorizzato dalla German Academic Scholarship Foundation e dall'EPSRC del Regno Unito, ha condotto gli esperimenti sugli utenti e identificato nuove sfide per il futuro. Ha detto:"Abbiamo scoperto che il modello dell'intenzione è più efficace quando i dati dello sguardo sono combinati con la conoscenza del compito. Ciò solleva una nuova domanda di ricerca:come può il robot recuperare questa conoscenza? Possiamo immaginare di imparare dalla dimostrazione o di coinvolgere un altro essere umano nella compito."
In vista di questa nuova sfida, i ricercatori stanno attualmente esplorando il controllo condiviso, interazione e nuove applicazioni all'interno dei loro studi sulla collaborazione remota attraverso il robot palmare. Un'attività di manutenzione funge da esperimento per l'utente, dove un utente di un robot portatile riceve assistenza tramite un esperto che controlla a distanza il robot.
La ricerca si basa sul robot portatile progettato e costruito dall'ex dottorato di ricerca. studente Austin Gregg-Smith, e che è disponibile come progetto open source tramite il sito del ricercatore all'indirizzo www.handheldrobotics.org.