I droni esplorano l'ambiente volando in diverse direzioni. Quando un drone nota un altro drone nella sua direzione preferita, tenterà di volare in una direzione diversa. Quando questo non è possibile (come in questa immagine), i droni con priorità più bassa si allontaneranno dai droni con priorità più alta. I droni affrontano gli ostacoli al volo, e così facendo entrare ed uscire da stanze diverse. Credito:TU Delft/ MAVLab
I ricercatori hanno presentato uno sciame di minuscoli droni in grado di esplorare completamente da soli ambienti sconosciuti. Questo lavoro, presentato in Robotica scientifica il 23 ottobre, è un passo significativo nel campo della robotica a sciame. La sfida deriva dal fatto che i minuscoli droni da 33 grammi devono navigare autonomamente pur avendo capacità di rilevamento e calcolo estremamente limitate. Il team di ricerca congiunto, con ricercatori della TU Delft, L'Università di Liverpool e la Radboud University di Nijmegen hanno affrontato questa sfida traendo ispirazione dalla relativa semplicità della navigazione degli insetti.
Ispirazione dalla natura
Gli sciami di insetti hanno ispirato i robotisti a pensare che i piccoli robot potrebbero anche essere in grado di superare i propri limiti individuali operando in uno sciame. Sciami di robot piccoli ed economici sarebbero in grado di eseguire compiti che sono attualmente fuori dalla portata di grandi, singoli robot. Ad esempio, uno sciame di piccoli droni volanti sarebbe in grado di esplorare un luogo del disastro molto più velocemente di un singolo drone più grande. Tali sciami non sono stati ancora realizzati.
Cerca e salva
Negli ultimi quattro anni, un gruppo di ricerca congiunto delle università di TU Delft, Università di Liverpool, e l'Università Radboud di Nimega, finanziato dal programma NWO Natural Artificial Intelligence della fondazione scientifica nazionale olandese, si è sforzato di progettare uno sciame di minuscoli droni in grado di esplorare ambienti sconosciuti. L'obiettivo del progetto di ricerca era quello di compiere passi verso l'utilizzo di sciami di droni in scenari di ricerca e salvataggio.
L'idea principale era che in futuro, i soccorritori saranno in grado di rilasciare uno sciame di minuscoli droni per esplorare un luogo del disastro come un edificio che sta per crollare. Lo sciame di fuchi entrerà nell'edificio, esploralo, e tornare alla stazione base con le informazioni pertinenti. I soccorritori possono quindi concentrare i loro sforzi sulle aree più rilevanti, ad esempio, dove ci sono ancora persone dentro.

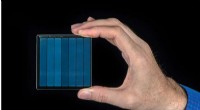
Il minuscolo drone sta nel palmo di una mano e pesa 33 grammi. Insieme agli altri droni in uno sciame, è in grado di esplorare rapidamente un ambiente non presidiato. Credito:TU Delft/ MAVLab
Trovare le vittime
Nel progetto, piccoli droni sono stati dotati di telecamere e inviati in un ambiente di ufficio al coperto per trovare due manichini che rappresentano le vittime in uno scenario di disastro. Questo compito di ricerca e salvataggio di prova del concetto ha mostrato chiaramente il vantaggio di avere uno sciame. Entro sei minuti, uno sciame di sei droni è stato in grado di esplorare circa l'80% delle stanze aperte, il che sarebbe impossibile per uno dei droni da solo. Per di più, anche la sciamatura si è rivelata utile per la ridondanza. Un drone ha trovato una vittima, ma a causa di un guasto hardware della fotocamera, non ha potuto riportare alcuna immagine. Per fortuna, un altro drone ha catturato la vittima con una telecamera, anche.
Sfida
"La più grande sfida nel raggiungere l'esplorazione dello sciame risiede al livello dell'intelligenza individuale dei droni, "dice Kimberly McGuire, il dottorato studente che ha realizzato il progetto. "All'inizio del progetto, ci siamo concentrati sul raggiungimento delle capacità di volo di base come il controllo della velocità e l'evitare gli ostacoli. Dopo di che, abbiamo progettato un metodo affinché i piccoli droni si rilevino ed evitino l'un l'altro. Abbiamo risolto questo problema facendo in modo che ogni drone trasportasse un chip di comunicazione wireless e quindi sfruttando la potenza del segnale tra questi chip:è come il numero di barre visualizzate sul telefono che diminuiscono quando ti allontani dal router WiFi di casa. I principali vantaggi di questo metodo sono che non richiede hardware aggiuntivo sul drone e richiede pochissimi calcoli".
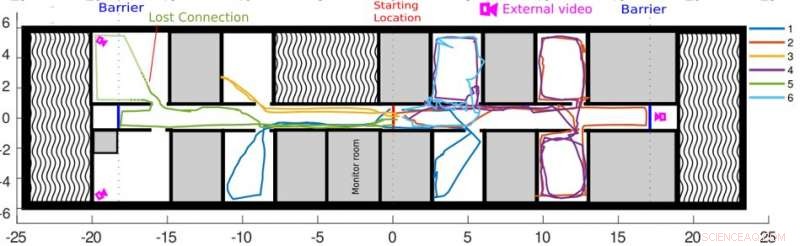
Traiettorie di 6 minuscoli droni che esplorano un intero piano di un ufficio in meno di 6 minuti. I droni prima volano via dalla stazione base nella posizione di partenza nel mezzo, esplora le stanze aperte, e infine tornare alla stazione base Credit:TU Delft/ MAVLab
Navigazione autonoma
La sfida più ardua per quanto riguarda l'esplorazione dello sciame, è la difficoltà di far navigare da soli piccoli robot in un ambiente sconosciuto. La ragione di ciò è che i minuscoli robot sono molto limitati in termini di rilevamento e calcolo.
Ancora, la natura ha fornito un'ispirazione importante. Gli insetti non creano mappe molto dettagliate. Anziché, conservano punti di riferimento e luoghi comportamentali rilevanti come le fonti di cibo e il loro nido. "L'idea principale alla base del nuovo metodo di navigazione è ridurre all'estremo le nostre aspettative di navigazione:richiediamo solo che i robot siano in grado di tornare alla stazione base, "dice Guido de Croon, ricercatore principale del progetto. "Lo sciame di robot si diffonde prima nell'ambiente facendo in modo che ogni robot segua una direzione preferita diversa. Dopo aver esplorato, i robot tornano a un segnale wireless situato nella stazione base."
Algoritmo bug
"Il metodo di navigazione proposto è un nuovo tipo di algoritmo di bug, " aggiunge Kimberly McGuire. "Gli algoritmi dei bug non creano mappe dell'ambiente ma affrontano gli ostacoli al volo. In linea di principio, le mappe dettagliate sono molto convenienti, perché consentono a un robot di navigare da qualsiasi punto della mappa a qualsiasi altro punto, lungo un percorso ottimale. Però, i costi per realizzare una tale mappa su minuscoli robot sono proibitivi. L'algoritmo di bug proposto porta a percorsi meno efficienti, ma ha il merito di poter essere implementato anche su piccoli robot".