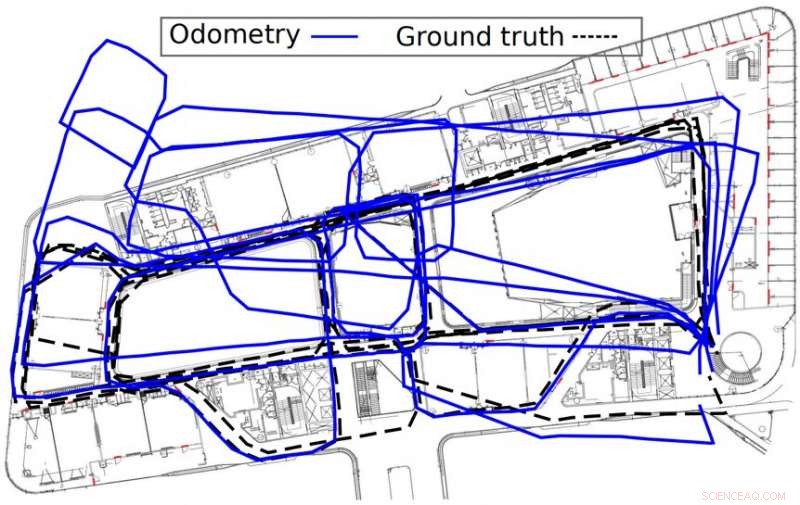
Figura che mostra come gli approcci alla verità di base si confrontano con le tecniche di odometria. Credito:Liu et al.
Negli ultimi anni, team di ricerca di tutto il mondo hanno sviluppato nuovi metodi per la localizzazione e la mappatura simultanee (SLAM). Queste tecniche possono essere utilizzate per costruire o aggiornare mappe di un dato ambiente in tempo reale, mentre contemporaneamente traccia la posizione di un agente artificiale o di un robot all'interno di queste mappe.
La maggior parte degli approcci SLAM esistenti si basa molto sull'uso di sensori basati sulla distanza o sulla visione, sia per rilevare l'ambiente che i movimenti di un robot. Questi sensori, però, può essere molto costoso e in genere richiede una potenza di calcolo significativa per funzionare correttamente.
Consapevole di questi limiti, ricercatori della Singapore University of Technology and Design, Southwest University of Science and Technology, l'Università di Moratuwa e la Nanyang Technological University hanno recentemente sviluppato una nuova tecnica per lo SLAM collaborativo che si basa su sensori basati sulla distanza o sulla visione. Questa tecnica, presentato in un articolo prepubblicato su arXiv, potrebbe consentire una navigazione robotica più efficace all'interno di ambienti interni sconosciuti a un costo significativamente inferiore a quello della maggior parte dei metodi proposti in precedenza.
"Volevamo utilizzare un sensore a basso costo e a basso calcolo in sostituzione dei sensori basati sulla distanza o visivi, "Chau Yuen, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Dal momento che gli edifici moderni in genere hanno una copertura di rete Wi-Fi, il nostro obiettivo è utilizzare tali informazioni liberamente disponibili per eseguire SLAM."
Per sfruttare le funzioni radio che sono prontamente disponibili nella maggior parte degli ambienti urbani, i ricercatori hanno sviluppato un approccio per la localizzazione simultanea collaborativa e la mappatura delle impronte digitali radio chiamato C-SLAM-RF. La loro tecnica funziona rilevando le misurazioni Wi-Fi in ampi ambienti interni e quindi utilizzando queste misurazioni per generare mappe o individuare agenti artificiali.
"Il nostro obiettivo è generare una mappa radio dell'ambiente con il minimo sforzo umano possibile sfruttando le capacità di rilevamento integrate degli smartphone comunemente usati, " Ha spiegato Yuen.
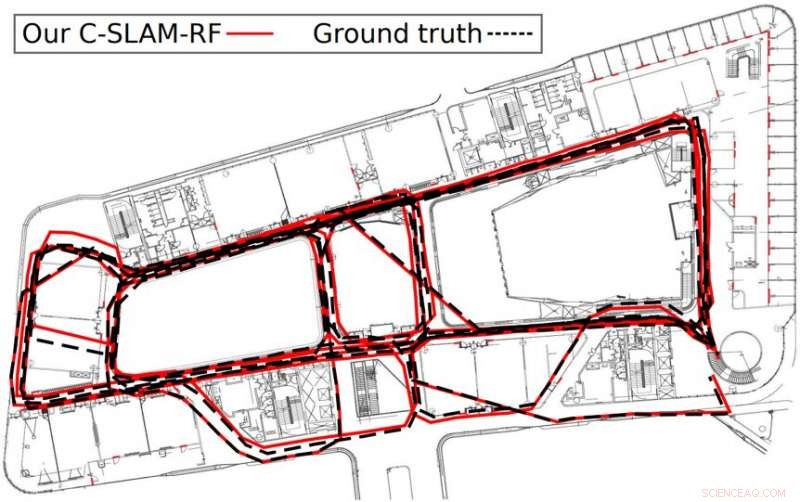
La figura mostra come gli approcci del percorso stimato si confrontano con la tecnica SLAM sviluppata dai ricercatori. Credito:Liu et al.
Il sistema sviluppato da Yuen e dai suoi colleghi riceve informazioni sulla potenza del segnale proveniente da punti di accesso Wi-Fi preesistenti sparsi in un determinato ambiente, così come dai processi di calcolo della stima dei pedoni (PDR) (cioè, calcoli della posizione attuale di qualcuno) derivato da uno smartphone. Quindi utilizza questi segnali per costruire una mappa dell'ambiente senza richiedere una conoscenza preliminare dell'ambiente o la distribuzione dei punti di accesso al suo interno. Lo strumento C-SLAM-RF ideato dai ricercatori può anche determinare se il robot è tornato in una posizione precedentemente visitata, noto come "chiusura del ciclo, " valutando la somiglianza tra le impronte radiofoniche dei diversi segnali.
"Gli approcci SLAM esistenti utilizzano spesso dispositivi dedicati, Per esempio, telecamere visive o sensori LIDAR basati sulla distanza, misurare la somiglianza delle osservazioni mediante scan matching o feature matching, che sono computazionalmente costosi, "U-Xuan Tan, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "La nostra soluzione sfrutta la possibilità di eseguire localizzazione e mappatura con costi contenuti, onnipresenti dispositivi IoT come smartphone, a causa della crescente popolarità delle reti wireless Wi-Fi."
Yuen, Tan e i loro colleghi hanno testato la loro tecnica in un ambiente interno con un'area di 130 metri x 70 metri. I loro risultati sono stati molto promettenti, poiché le prestazioni del loro sistema superavano quelle di molte altre tecniche esistenti per SLAM, spesso con un margine considerevole.
"Abbiamo valutato il nostro approccio in un ambiente su larga scala e abbiamo ottenuto una precisione di posizionamento di 0,6 metri senza alcuna conoscenza preliminare dell'ambiente, " Ran Liu, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Questa precisione supera l'approccio di localizzazione all'avanguardia basato sul fingerprinting, che richiede una noiosa indagine dell'ambiente. Il tempo di calcolo richiesto dal nostro approccio è insignificante rispetto allo SLAM basato sull'intervallo o visivo".
Nel futuro, l'approccio per SLAM collaborativo ideato da questo team di ricercatori potrebbe aiutare a migliorare la navigazione dei robot in ambienti sconosciuti. Inoltre, il fatto che non richieda l'uso di sensori costosi e si basi su hotspot Wi-Fi esistenti lo rende una soluzione più fattibile per implementazioni su larga scala.
"Vorremmo ora esplorare la possibilità di fondere diversi segnali radio, per esempio segnale cellulare, per migliorare la precisione di posizionamento, "Yong Liang Guan, un altro ricercatore coinvolto nello studio, ha detto a TechXplor. "Un altro piano è utilizzare la mappa radio prodotta ai fini della localizzazione. Una combinazione con altri sensori, ad esempio i telemetri laser, per accelerare e migliorare la mappatura in ambienti su larga scala sarà anche una delle nostre ricerche future".
© 2020 Scienza X Rete