Credito:Tan et al.
I robot auto-riconfigurabili (SRR) che possono cambiare automaticamente forma e adattarsi all'ambiente circostante hanno recentemente attirato molto interesse nella comunità di ricerca sulla robotica. Questi robot potrebbero avere diverse applicazioni utili, in quanto possono acquisire un alto livello di autonomia nel percepire l'ambiente circostante, nonché nella pianificazione e nell'esecuzione di azioni adeguate. Mentre gli studi precedenti hanno introdotto metodi per classificare questi robot in sottogruppi, non esiste ancora una procedura standard per valutarne le prestazioni.
Con questo in testa, i ricercatori della Sun Yat-sen University in Cina e della Singapore University of Technology and Design hanno recentemente sviluppato un quadro per la tassonomia e la valutazione (TAEV) di robot auto-riconfigurabili. Il loro studio, in primo piano Accesso IEEE , è stato finanziato dal National Robotics R&D Program Office di Singapore.
"Finora, ricercatori hanno ideato un approccio qualitativo per classificare gli SRR, ma non metodi quantitativi che possano guidare il progettista, produttore e utente del robot, "Abdullah Aamir Hayat, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Questo ci ha motivato a sviluppare un quadro e un metodo di valutazione per gli SRR".
Negli SRR, la capacità di cambiare forma per completare un determinato compito dipende principalmente dal tipo di meccanismi impiegati dai robot e dal loro livello di autonomia. Mentre alcuni sistemi SRR sono completamente autonomi, altri richiedono un certo grado di teleoperazione manuale.
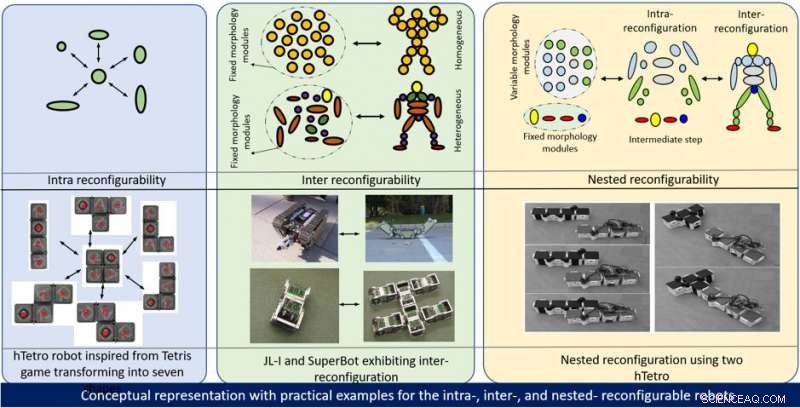
A livello meccanico, i robot possono essere classificati in tre categorie principali:quelli con un intra-, Inter-, e riconfigurazione annidata. La differenza tra le riconfigurazioni intra e intere risiede nel numero di configurazioni disponibili per il robot e nella scala di queste configurazioni.
La distinzione tra intra- e inter-riconfigurabilità è che la prima coinvolge un singolo modulo robotico che può cambiare la sua morfologia senza alcun assemblaggio o smontaggio e la seconda coinvolge due o più moduli che possono essere assemblati o smontati. Integrando sia l'inter che l'intra si ottiene la riconfigurabilità annidata. Credito:Tan et al.
L'intra-riconfigurabilità coinvolge un singolo modulo robotico che può cambiare la sua morfologia senza alcun montaggio o smontaggio, mentre l'inter-riconfigurabilità coinvolge due o più moduli che possono essere assemblati o smontati. Finalmente, riconfigurazione annidata, coniato dal Prof. Mohan Rajesh Elara e dal Prof. Kristin L. Wood, combina le caratteristiche di entrambe le riconfigurazioni intra e inter.
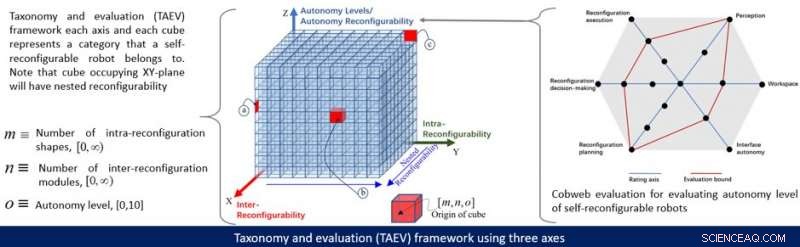
Nella loro carta, Hayat e i loro colleghi hanno introdotto metriche che possono essere utilizzate per valutare gli SRR, quantificando il loro livello di autonomia e il numero di configurazioni a loro disposizione. Queste metriche sono state combinate per creare un quadro TAEV che potrebbe guidare ricercatori e produttori nella valutazione dei loro sistemi robotici.
"Il nostro lavoro quantifica la riconfigurabilità del meccanismo assegnando un indice sulla base di un numero di morfologia di significato e del numero di moduli coinvolti, "Ha spiegato Hayat. "Questi indici sono rappresentati sui due assi (X- e Y-) nel telaio a tre assi. Al terzo asse (Z-) è assegnato l'indice dato dal livello di autonomia che viene calcolato utilizzando il modello di valutazione della ragnatela costituito da sei indicatori di performance ovvero pianificazione della riconfigurazione, il processo decisionale, autonomia dell'interfaccia, percezione, e spazio di lavoro."
Il vantaggio principale del framework sviluppato da Hayat e dai suoi colleghi è che assegna un indice univoco a un dato SRR all'interno dello spazio tassonomico 3-D che hanno delineato nel loro articolo. Di conseguenza, potrebbe essere utilizzato per progettare studi di compromesso e ideare approcci per valutare o confrontare le prestazioni di diversi SRR sullo stesso compito.
"Il quadro generico che abbiamo presentato può essere applicato a numerosi SRR esistenti, consentendo loro di essere classificati non solo qualitativamente in base alla loro dimensione, locomozione, ecc. ma anche quantitativamente, incorporando il meccanismo e l'autonomia dei robot, "ha detto Hayat.
Nel futuro, questo quadro per TAEV potrebbe aiutare a valutare gli SRR in modo più efficace, identificando anche i loro limiti e le caratteristiche che potrebbero essere migliorate. Sia i ricercatori che i produttori potrebbero utilizzarlo per confrontare le prestazioni di robot diversi sugli stessi compiti o per valutare versioni diverse dello stesso robot. Nella loro carta, Hayat e i loro colleghi discutono anche di altre potenziali applicazioni per il nuovo framework, utilizzando robot esistenti come esempi.
"I nostri risultati suggeriscono che esiste un enorme potenziale per nuovi progetti di robot con autonomia per occupare lo spazio tridimensionale e che le architetture riconfigurabili annidate potrebbero avere molte applicazioni pratiche, " Hayat ha detto. "Con questo in mente, il nostro gruppo sta lavorando all'implementazione di nuove soluzioni intra-, Inter-, e architetture robotiche riconfigurabili nidificate per l'esecuzione di attività di manutenzione, vale a dire pulizia e sorveglianza autonome."
© 2020 Scienza X Rete