Illustrazione del robot utilizzato dai ricercatori. Credito:Nordmoen et al.
Una delle sfide chiave per la ricerca sulla robotica è lo sviluppo di sistemi di controllo efficaci e resilienti, che consentono ai robot di navigare in una varietà di ambienti e affrontare eventi imprevisti. I ricercatori dell'Università di Oslo hanno recentemente sviluppato una tecnica evoluta di coordinazione di fase incorporata per una robusta locomozione di robot quadrupedi. Il loro lavoro, pubblicato su arXiv, è stato in parte sponsorizzato dal Consiglio di ricerca norvegese.
"Il fattore motivante per noi è stata l'osservazione che alcuni comportamenti dei robot che abbiamo addestrato nella simulazione non hanno funzionato correttamente quando sono stati testati sul robot reale, "Jørgen Nordmoen, uno dei ricercatori coinvolti nello studio, ha detto a TechXplore. "Questa osservazione è una sfida nota, spesso chiamato "il divario della realtà, ' e volevamo vedere se l'utilizzo dei dati dei sensori potesse aiutare a superare questa sfida".
Per ridurre efficacemente il "gap di realtà" che si osserva spesso negli studi di robotica, Nordmoen e i suoi colleghi volevano combinare generatori di pattern centrali (CPG) con feedback dal corpo e dai sensori del robot. I CPG sono un metodo popolare per generare ondulazioni ritmiche o schemi motori nei robot, che può essere usato come supporto per il movimento. I CPG artificiali si ispirano al midollo spinale degli animali, che sono noti per contenere neuroni che generano segnali ritmici in assenza di informazioni sensoriali.
"I CPG sono relativamente semplici da addestrare, però, non incorporano di per sé alcuna informazione sul mondo esterno, " Ha detto Nordmoen. "I nostri obiettivi principali erano vedere se potevamo combinare con successo una complessa rete CPG con il coordinamento di fase incorporato e se l'incorporazione dei dati dei sensori potesse migliorare il comportamento del robot nel mondo reale".
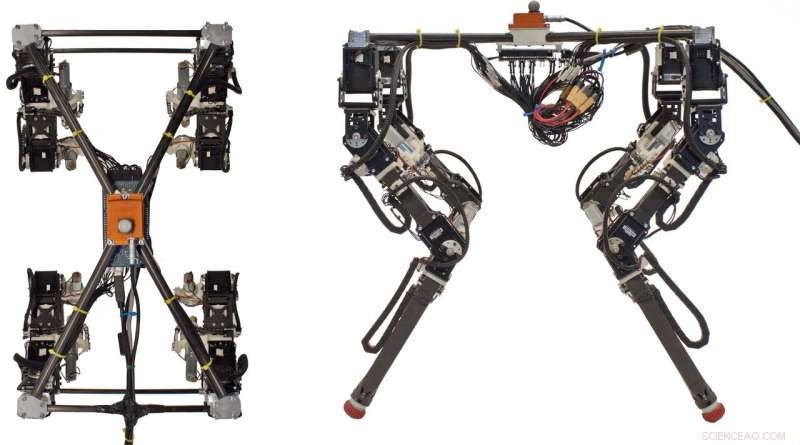
Immagini del robot utilizzato dai ricercatori. Credito:Nordmoen et al.
Le tecniche di coordinamento di fase incorporate funzionano rilevando la quantità di pressione esercitata dal robot in ciascuno dei suoi piedi, utilizzando questa misura per controllare la sincronizzazione delle sue gambe. Nel loro studio, i ricercatori hanno impiegato un approccio minimalista chiamato TEGOTAE, che utilizza il feedback del sensore per l'accoppiamento di fase emergente tra le gambe del robot.
Generalmente, nei robot con le gambe, ogni gamba è esplicitamente coordinata con le altre, il che significa che una gamba conosce sempre la posizione relativa delle altre gambe. In contrasto, nell'approccio di coordinamento di fase incorporato ideato da Nordmoen e dai suoi colleghi, ogni gamba è disaccoppiata dalle altre e il corpo stesso impone implicitamente la sincronizzazione tra le gambe. Il sensore di pressione del piede aggiunto dai ricercatori consente la sincronizzazione implicita, migliorando infine la coordinazione del robot.
"Il nostro metodo utilizza un CPG più complesso rispetto ad altri approcci, utilizzando il coordinamento di fase incorporato ed eseguendo gli esperimenti su un robot più complesso, " ha detto Nordmoen. "Inoltre, abbiamo addestrato il CPG utilizzando un algoritmo di ottimizzazione evolutiva, che, insieme alla coordinazione di fase incorporata, consente al ritmo della camminata di adattarsi automaticamente al robot e all'ambiente."
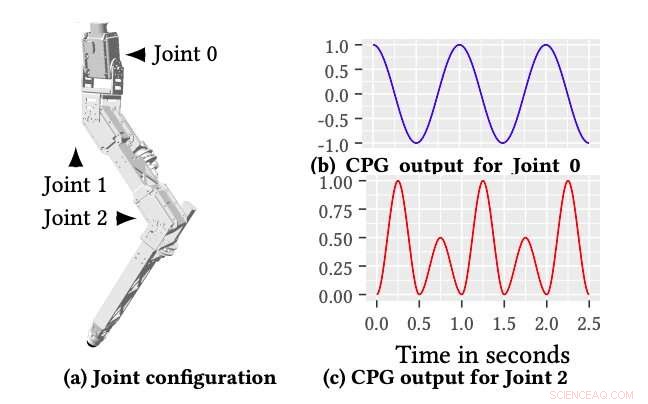
(a) mostra una rappresentazione visiva di una gamba del robot con i giunti contrassegnati. (b) mostra un esempio di curva di controllo per Joint 0 e Joint 1 mentre (c) mostra un esempio di curva di controllo per Joint 2. Credito:Nordmoen et al.
Nel loro studio, i ricercatori hanno applicato il loro metodo a DyRET, un robot a quattro zampe con una morfologia da mammifero. Hanno prima addestrato il robot quadrupede in simulazioni, e successivamente trasferirono i loro test nel mondo reale per verificare se l'addestramento fosse efficace. Ciò ha permesso loro di valutare la loro tecnica prima di applicarla in scenari del mondo reale senza causare danni al robot.
"In pratica, il nostro lavoro potrebbe portare a robot con le gambe che si adattano meglio all'ambiente circostante, gestendo così ambienti diversi, " Ha detto Nordmoen. "Ciò include la facilitazione del trasferimento dei controller dei robot dalla simulazione al mondo reale. Come abbiamo scritto sul giornale, i robot con le gambe hanno la possibilità di aiutare le condizioni dell'utente con poche regolazioni necessarie da parte dell'utente rispetto ai robot con le ruote."
La tecnica ideata da Nordmoen e dai suoi colleghi potrebbe facilitare lo sviluppo di robot con capacità di locomozione più robuste. Nel futuro, altri ricercatori potrebbero integrare l'approccio nei loro robot o trarre ispirazione da questo studio per sviluppare tecniche simili. Secondo Nordmoen, le difficoltà associate all'integrazione del feedback dei sensori nei robot con gambe e la semplicità di questo nuovo approccio di coordinamento di fase incorporato potrebbero essere un ottimo punto di partenza per la ricerca futura.
"Stiamo attualmente lavorando per comprendere meglio il meccanismo che sta alla base del coordinamento di fase incorporato, " ha aggiunto. "Questo si spera ci permetterà di migliorare il concetto e generare migliori strategie di movimento. Inoltre, vorremmo vedere come viene influenzata la coordinazione di fase incorporata se il robot stesso cambia. Con il nostro robot unico, DyRET, abbiamo la capacità di alterare la morfologia del robot e possiamo testare come tali cambiamenti influenzerebbero il nostro approccio".
© 2019 Scienza X Rete