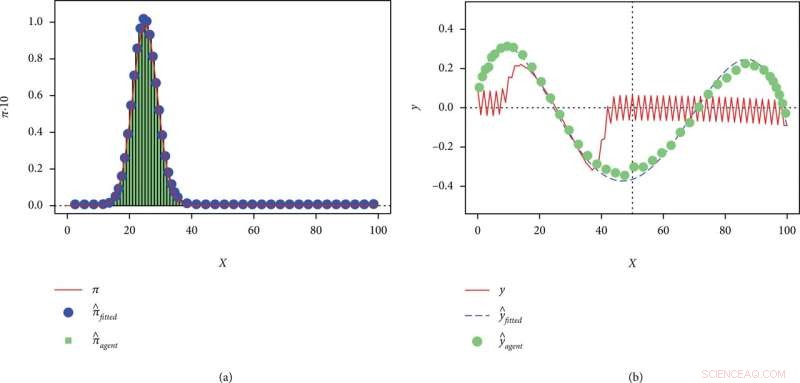
Risultati per lo scenario unimodale. Illustrazione del metodo di progettazione e confronto con simulazioni multiagente per lo scenario unimodale:(a) descrive la distribuzione stazionaria e (b) il cambiamento atteso. Credito:Informatica intelligente (2022). DOI:10.34133/2022/9761694
Le alghe fioriscono, gli uccelli si affollano e gli insetti sciamano. Questo comportamento in massa da parte dei singoli organismi può fornire un bene separato e collettivo, come migliorare le possibilità di una buona propagazione dell'accoppiamento o fornire sicurezza. Ora, i ricercatori hanno sfruttato le capacità di auto-organizzazione necessarie per raccogliere i benefici degli sciami naturali per applicazioni robotiche nell'intelligenza artificiale, nell'informatica, nella ricerca e nel salvataggio e molto altro ancora.
Hanno pubblicato il loro metodo il 3 agosto su Intelligent Computing .
"Progettare un insieme di regole che, una volta eseguite da uno sciame di robot, si traduca in uno specifico comportamento desiderato è particolarmente impegnativo", ha affermato l'autore corrispondente Marco Dorigo, professore nel laboratorio di intelligenza artificiale, denominato IRIDIA, dell'Université Libre de Bruxelles, Belgio. "Il comportamento dello sciame non è una mappa uno a uno con semplici regole eseguite da singoli robot, ma risulta dalle complesse interazioni di molti robot che eseguono lo stesso insieme di regole."
In altre parole, i robot devono lavorare insieme per raggiungere l'obiettivo somma dei contributi discreti. Il problema, secondo Dorigo e i suoi coautori Dr. Valentini e Prof. Hamann, è che la progettazione convenzionale per le singole unità per raggiungere un obiettivo collettivo è dal basso, richiedendo perfezionamenti per tentativi ed errori che possono essere costosi.
"Per affrontare questa sfida, proponiamo un nuovo approccio progettuale globale-locale", ha affermato Dorigo. "La nostra idea chiave è quella di comporre uno sciame eterogeneo utilizzando gruppi di agenti comportamentali diversi in modo tale che il comportamento risultante dello sciame si avvicini a un input dell'utente che rappresenta il comportamento dell'intero sciame."
Questa composizione prevede la selezione di singoli agenti con comportamenti predeterminati che i ricercatori sanno lavoreranno insieme per raggiungere il comportamento collettivo target. Perdono la possibilità di programmare localmente le singole unità, ma secondo Valentini, Hamann e Dorigo ne vale la pena. Hanno indicato l'esempio di un'attività di sorveglianza, in cui uno sciame potrebbe aver bisogno di monitorare una struttura che richiede più monitoraggio interno durante il giorno e più monitoraggio esterno durante la notte.
"L'utente fornisce una descrizione delle allocazioni di sciame desiderate come distribuzione di probabilità nello spazio di tutte le possibili allocazioni di sciame:più agenti all'interno durante il giorno, più fuori di notte o viceversa", ha affermato Valentini.
L'utente definirebbe il comportamento target modificando il numero e la posizione delle modalità di distribuzione, con ciascuna modalità corrispondente a un'allocazione specifica, come l'80% degli agenti all'interno, il 20% all'esterno durante il giorno e il 30% all'interno, il 70% all'esterno durante la notte. Ciò consente allo sciame di cambiare comportamento periodicamente e autonomamente, predeterminato dalle modalità impostate, al variare delle circostanze.
"Sebbene sia difficile trovare le regole di controllo esatte per i robot in modo che lo sciame si comporti come desideriamo, è possibile ottenere un comportamento sciame desiderato combinando diversi insiemi di regole di controllo che già comprendiamo", ha affermato Dorigo. "I comportamenti degli sciami possono essere progettati macroscopicamente mescolando robot con diversi set di regole predefiniti."
Questa non è la prima volta che Dorigo si rivolge alla natura per migliorare gli approcci informatici. In precedenza ha sviluppato l'algoritmo di ottimizzazione delle colonie di formiche, basato su come le formiche navigano tra le loro colonie e le fonti di cibo, per risolvere problemi di calcolo difficili che implicano la ricerca di una buona approssimazione di un percorso ottimale su un grafico.
Sebbene Dorigo abbia proposto per la prima volta questo approccio per un problema relativamente semplice, da allora si è evoluto come mezzo per affrontare una varietà di problemi. Dorigo ha detto che intende portare la metodologia dello sciame in una direzione simile.
"Il nostro prossimo passo immediato è dimostrare la validità della nostra metodologia attraverso un insieme più ampio di comportamenti dello sciame e andare oltre l'allocazione delle attività", ha affermato Dorigo. "Il nostro obiettivo finale è capire cosa lo rende possibile, formalizzando una teoria generica per consentire a ricercatori e ingegneri di progettare comportamenti sciami senza passare attraverso il meticoloso processo di tentativi ed errori". + Esplora ulteriormente