Credito:Geist et al.
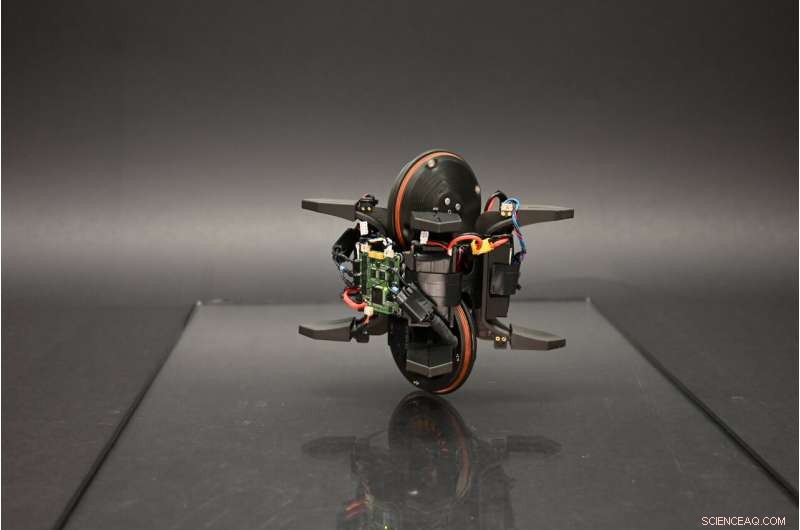
I ricercatori della RWTH Aachen University nel team del Prof. Sebastian Trimpe e del Max Planck Institute for Intelligent Systems (MPI-IS) di Stoccarda hanno recentemente sviluppato Wheelbot, un monociclo a ruota di reazione simmetrica che può saltare autonomamente sulle ruote da qualsiasi posizione iniziale. Questo robot unico, presentato in un documento pubblicato nelle IEEE Robotics and Automation Letters è stato fabbricato utilizzando una combinazione di componenti standard e stampati in 3D.
"Il nostro gruppo di ricerca lavora all'intersezione tra scienza dei dati e ingegneria. Una direzione particolare della nostra ricerca si concentra sulla combinazione delle intuizioni della teoria del controllo con l'apprendimento automatico", ha detto a Tech René Geist, membro del team di Trimpe ad Aquisgrana e ricercatore capo di Wheelbot Xplore. "Bianchi di prova come pendoli, bracci robotici e quadricotteri, ci aiutano a verificare se i presupposti teorici alla base di un algoritmo sono pratici nella realtà. Idealmente, questi banchi di prova sono semplici da usare mentre sono difficili da controllare con algoritmi all'avanguardia , costringendoci a pensare fuori dagli schemi".
Altri due esempi di tali banchi di prova sono il cosiddetto "Balancing Cube" e il suo discendente "Cubli". Questi due sistemi hanno spesso aiutato a valutare l'efficacia dei sistemi di controllo della rete e dei metodi basati sui dati per ottenere un controllo non lineare.
Il recente lavoro di Trimpe, Geist e dei loro colleghi si basa su questi precedenti sforzi sul campo. Il loro obiettivo era sviluppare un robot monociclo minimalista che potesse essere utilizzato come banco di prova da robotici e informatici di tutto il mondo. Per fare ciò, Trimpe e il suo gruppo di ricerca presso la RWTH Aachen University hanno unito le forze con Jonathan Fiene, capo del laboratorio ZWE Robotics presso l'MPI-IS.
"All'inizio del progetto, abbiamo optato per l'utilizzo di motori brushless, poiché la robotica ZWE ha molta esperienza nell'utilizzo di questi nell'iniziativa dei robot dinamici aperti, mentre i prezzi dei motori brushless leggeri sono diminuiti a causa del diffuso adattamento dei quadricotteri nel consumatore mercato", ha spiegato Geist. "Quando guardi un motore, probabilmente l'attuatore più semplice che si possa inventare è quello di attaccarvi una ruota. Se una ruota del genere tocca il suolo, la chiamiamo 'ruota rotante', in caso contrario, ci riferiamo a come una 'ruota di reazione'."
Bilanciare un robot a corpo unico, non volante con la capacità di guidare ed eseguire manovre, richiede generalmente un minimo di due ruote. Queste possono essere ruote rotanti, risultando in un robot simile a un Segway o una singola ruota rotante e una ruota di reazione, risultando in quello che è noto come un robot monociclo "ruota di reazione" o "scambio di momenti".
I robot monociclo che integrano ruote di reazione hanno un design molto semplice e possono essere facilmente assemblati sia da esperti di robotica che da studenti. Nonostante la loro semplicità, i monocicli a ruota di reazione sono piuttosto difficili da controllare. Questo li rende banchi di prova particolarmente favorevoli per la ricerca su reti di robot e metodi di controllo basati sull'apprendimento.
"I robot monociclo proposti in precedenza sono progettati per bilanciarsi strettamente attorno alla loro posizione di equilibrio verticale, il che limita notevolmente ciò che puoi fare con questi sistemi", ha affermato Geist. "Per massimizzare l'utilità di un robot monociclo con ruota di reazione, abbiamo deciso che il Wheelbot deve essere in grado di riprendersi da disturbi piuttosto grandi, ha un'alimentazione a bordo per evitare che i cavi ne limitino la manovrabilità e inoltre deve essere in grado di automontarsi dopo rovesciamento".
Come le ruote dei monocicli, il Wheelbot ha una ruota di rotolamento che ne impedisce il ribaltamento durante lo spostamento longitudinale. A differenza dei monocicli, però, il robot integra anche una ruota di reazione che ne impedisce il ribaltamento in direzione laterale.
"Per cogliere il funzionamento interno di una ruota di reazione, puoi fare un semplice esperimento a casa", ha detto Geist. "Tutto ciò di cui hai bisogno è una sedia girevole e un oggetto moderatamente pesante, come un gatto. Siediti con le ginocchia sulla sedia e raddrizza le braccia mentre tieni il gatto, quindi ruota la parte superiore del corpo in senso orario. Mentre il gatto soccombe al suo destino, noterai che le tue ginocchia ruotano in senso antiorario. In questa analogia, la parte superiore del corpo indica il rotore del motore mentre la parte inferiore del corpo indica lo statore del motore.
In sostanza, nelle ruote di reazione, quando il rotore di un motore (attaccato alla ruota) ruota in senso orario, lo statore del motore (attaccato al resto del Wheelbot) ruoterà in senso antiorario. I robot che bilanciano utilizzando una ruota di reazione differiscono dai robot che ricorrono ai giroscopi per il bilanciamento. In un giroscopio, una ruota a rotazione rapida viene ruotata ortogonalmente rispetto al suo senso di rotazione creando coppie di bilanciamento dovute alla conservazione del momento angolare.
In una ruota di reazione si verificano anche questi effetti, ma sono minuscoli rispetto alle coppie di reazione. Le coppie di reazione vengono create direttamente all'interno della ruota e puntano parallelamente al senso di rotazione della ruota.
Credito:Geist et al.
"Durante l'auto-montaggio, le coppie di reazione devono ruotare il Wheelbot di 90 gradi", ha spiegato Geist. "Durante la manovra, il motore del Wheelbot assorbe 16 Ampere a 24 Volt. Per un robot grande 22 cm (8,7 pollici), i motori sono davvero potenti, costringendoci a utilizzare un controller motore progettato su misura, come lo erano i controller motore disponibili in commercio troppo grande o non in grado di gestire abbastanza corrente alla tensione data."
Con un assorbimento di corrente di 16 Ampere, i ricercatori hanno scoperto che il motore che muoveva il Wheelbot ha raggiunto il suo limite di velocità in soli 0,25 secondi. A causa di questa limitazione e di altre sfide tipicamente incontrate quando si costruiscono monocicli basati su ruote di reazione, Geist e i suoi colleghi hanno deciso di ideare un design completamente nuovo per il loro robot.
"In primo luogo, abbiamo deciso che il robot dovrebbe essere simmetrico, riducendo efficacemente il numero di parti diverse che è necessario stampare e consentendo al Wheelbot di utilizzare una qualsiasi delle sue ruote come ruota di rotolamento", ha affermato Geist. "La simmetria ha l'ulteriore vantaggio che la ruota superiore deve essere considerevolmente più piccola rispetto ai robot monociclo esistenti, il che riduce la sua inerzia rotazionale nella direzione di imbardata. In secondo luogo, abbiamo progettato le dimensioni del robot per ridurre al minimo la coppia richiesta per l'auto-montaggio".
Nei test iniziali, i ricercatori hanno scoperto che la versione standard del loro robot poteva saltare sulle ruote da qualsiasi posizione iniziale in due fasi. Ciò consente al robot di decelerare la sua ruota di reazione prima di completare il secondo e ultimo passaggio (cioè, spingersi indietro). '
Oltre a creare un prototipo del loro robot, Geist e i suoi colleghi hanno anche creato uno stimatore di stato personalizzato, un algoritmo in grado di stimare gli angoli di rollio e beccheggio del robot. Questo sistema deriva le sue stime dalle misurazioni delle quattro unità di misura inerziale (IMU) e dei codificatori a ruota del robot, che si basano solo sulle conoscenze pregresse e disponibili sul cosiddetto modello cinematico del robot (vale a dire, una descrizione matematica della posizione del robot centro di Massa).
"Pensiamo che nel caso dei robot su ruote (compresi i Ballbots), lo stimatore proposto costituisca un'interessante alternativa ad altri algoritmi di stima come il filtraggio di Kalman", ha affermato Geist. "Il Wheelbot dimostra che una scelta concisa delle dimensioni e dell'hardware di un robot monociclo con ruota di reazione produce un banco di prova versatile per il controllo della robotica".

Credito:Geist et al.
Geist e i suoi colleghi sono stati i primi a creare un robot monociclo in grado di saltare in modo efficiente sulle ruote da qualsiasi posizione iniziale. La loro carta è quindi un contributo importante al campo della robotica, in quanto risolve le sfide elettroniche e meccaniche tipicamente incontrate durante la creazione di questo nuovo tipo di monocicli basati su ruote di reazione.
"Oltre ad essere un banco di prova impegnativo per il controllo dei robot, vediamo un grande potenziale per Wheelbot come piattaforma educativa che introduce gli studenti alla robotica", ha affermato Geist. "A questo proposito, il Wheelbot è un tipico esempio per dimostrare la natura interdisciplinare della robotica. Oltre alla sua progettazione meccanica che richiede la modellazione e la simulazione di dinamiche piuttosto interessanti del robot, l'assorbimento di corrente elevato dei suoi motori pone sfide significative alla sua progettazione elettronica".
In futuro, il Wheelbot potrebbe essere utilizzato sia in contesti educativi che di ricerca per testare reti di controllo robotico, algoritmi di apprendimento automatico e altri modelli. Un vantaggio chiave del robot è che il suo funzionamento richiede solo una conoscenza di base dell'ingegneria del software, il che lo rende una piattaforma sperimentale ideale per studenti e ingegneri che fanno i primi passi nella robotica.
I ricercatori del team di Trimpe stanno ora lavorando a una nuova versione del loro robot, chiamata Wheelbot v3. Un obiettivo fondamentale è rendere il robot ancora più accessibile, in modo che sia più facile da costruire, utilizzare e sperimentare.
"La prossima versione di Wheelbot sarà un po' più piccola della versione attuale, utilizza un microcontrollore più potente e in termini di design del firmware è più facile da usare", ha aggiunto Geist. "Inoltre, attualmente lavoriamo su un algoritmo di controllo che guida il Wheelbot lungo un percorso predefinito. Dopo aver costruito il primo robot monociclo con ruota a reazione a salto, siamo entusiasti di dimostrare che il Wheelbot è anche in grado di eseguire manovre di guida agili". + Esplora ulteriormente
© 2022 Rete Science X