La ricerca per sviluppare un micro-robot wireless per applicazioni biomediche richiede un "motore" su piccola scala che può essere alimentato in modalità wireless attraverso mezzi biologici. Mentre i campi magnetici possono essere utilizzati per alimentare piccoli robot in modalità wireless, non forniscono selettività poiché tutti gli attuatori (i componenti che controllano il movimento) sotto lo stesso campo magnetico seguono semplicemente lo stesso movimento. Per affrontare questa limitazione intrinseca dell'attuazione magnetica, un team di ricercatori tedeschi ha sviluppato un modo per utilizzare le microbolle per fornire la specificità necessaria per alimentare i micro-robot per applicazioni biomediche.
Questa settimana in Lettere di fisica applicata , il team descrive questo nuovo approccio che offre molteplici vantaggi rispetto alle tecniche precedenti.
"Primo, applicando ultrasuoni a frequenze diverse, più attuatori possono essere indirizzati singolarmente; secondo, gli attuatori non necessitano di elettronica di bordo che li rende più piccoli, più leggero e più sicuro; e terzo, l'approccio è scalabile alla dimensione sub-millimetrica, " disse Tian Qiu, ricercatore presso il Max Planck Institute for Intelligent Systems in Germania.
Il team di ricerca ha riscontrato alcune sorprese lungo la strada. Normalmente un materiale speciale, come un materiale magnetico o piezoelettrico, è necessario per un attuatore. In questo caso, hanno usato un polimero commerciale standard che intrappola semplicemente le bolle d'aria, e quindi ha utilizzato l'interfaccia aria-liquido delle bolle intrappolate per convertire la potenza degli ultrasuoni in movimento meccanico.
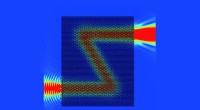
"Abbiamo scoperto che una superficie sottile (30-120 micrometri di spessore effettivo) con un modello topologico appropriato può fornire forza di propulsione utilizzando gli ultrasuoni, e migliaia di queste bolle insieme possono spingere un dispositivo su scala millimetrica, " ha detto Qiu. "La semplicità della struttura e del materiale per svolgere questo compito è stata una piacevole sorpresa."
Il team non vede l'ora di sviluppare ulteriormente il proprio attuatore.
"I prossimi passi sono aumentare la forza propulsiva della superficie funzionale, integrare l'attuatore in un utile dispositivo biomedico, e poi testarlo in un vero ambiente biologico, anche in vivo, " disse Qi.
L'adozione di superfici microstrutturate come attuatori wireless apre promettenti nuove possibilità nello sviluppo di dispositivi e strumenti miniaturizzati per ambienti fluidi accessibili da campi a ultrasuoni a bassa intensità. Queste superfici funzionali potrebbero fungere da attuatori wireless pronti per il collegamento, alimentazione di dispositivi biomedici miniaturizzati per applicazioni come gli endoscopi attivi.