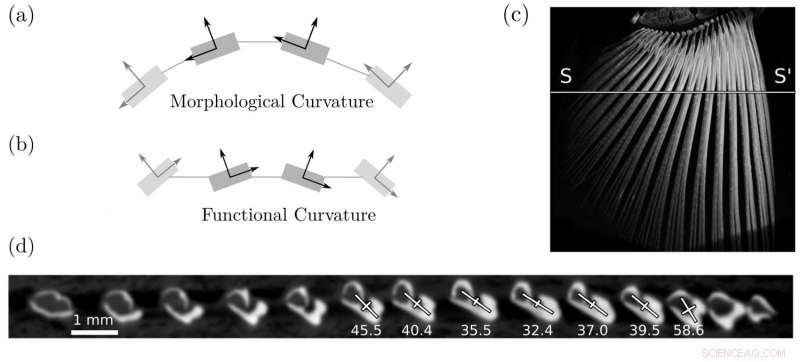
Una nuova ricerca suggerisce che le pinne dei pesci possono sfruttare la "curvatura funzionale" per aumentare la loro rigidità per il nuoto. Credito:Mandre Lab / Brown University
Gli appassionati di pizza sanno bene che una semplice curvatura a forma di U sulla crosta può impedire a una fetta sottile di cadere quando viene sollevata da un piatto. Un team di ingegneri della Brown University ha dimostrato che i pesci possono sfruttare all'incirca le stesse dinamiche per irrigidire le pinne per nuotare.
Utilizzando un modello matematico e la pinna pettorale di sgombro come esempio illustrativo, i ricercatori mostrano come la rigidità delle pinne può essere modificata applicando una curvatura a forma di U alla base della pinna. L'effetto, dicono i ricercatori, potrebbe essere alla base della capacità dei pesci di nuotare a velocità ampiamente variabili in tutti i tipi di correnti con grande manovrabilità.
"Un modo per diventare più manovrabili è avere la capacità di generare quantità variabili di forza sull'acqua quando si agita una pinna, " disse Shreyas Mandre, un assistente professore alla Brown's School of Engineering e coautore della ricerca. "Pensiamo che i pesci modulino la curvatura alla base della pinna per renderla più rigida o più morbida, che altera la forza che generano sull'acqua, che a sua volta può essere alla base di parte della loro manovrabilità."
La ricerca è stata condotta in collaborazione con Khoi Nguyen e Madhusudhan Venkadesan della Yale University, Ning Yu dell'UCLA e Mahesh M. Bandi dell'Okinawa Institute of Science and Technology. È descritto in Journal of the Royal Society Interface .
Il modello matematico sviluppato da Mandre e dai suoi colleghi si applica a una vasta classe di pesci noti come Actinopterigi. Si tratta di specie ittiche con pinne a ventaglio costituite da lunghe ossa pieghevoli tenute insieme da un tessuto molle elastico.
Parlando in generale, dicono i ricercatori, si è ipotizzato che la rigidità di queste alette sia calcolata dalla rigidità alla flessione di ogni osso moltiplicata per il numero di ossa. Ma quella semplice immagine ignora l'interazione meccanica tra le ossa pieghevoli e la pelle elastica, che potrebbe produrre molta più rigidità di quanto suggerirebbe il modello semplice. Questa interazione risulta anche essere il meccanismo attraverso il quale i pesci modificano la rigidità di una pinna tramite la curvatura alla base.
I ricercatori hanno esaminato le scansioni micro-TC di array ossei nelle pinne di sgombro, che sono ampiamente rappresentativi dei pesci con pinne raggiate. Hanno dimostrato che la forma delle ossa le fa piegare più facilmente in particolari direzioni, e che la direzione di piegatura "preferita" di ciascun osso è leggermente disallineata rispetto alle ossa adiacenti. Secondo la loro modalità matematica, questa disposizione significa che quando viene applicata una forza attraverso una pinna, le ossa si piegano collettivamente in un modo che le fa allargare. Però, quel movimento divaricato è contrastato dal tessuto elastico che lega insieme le ossa, ed è quella resistenza che irrigidisce l'intera pinna.
Il modo in cui questa architettura trasmette le forze è sostanzialmente simile al modo in cui le forze vengono trasmesse in una fetta di pizza che è curvata alla crosta e diventa più rigida lungo la sua lunghezza. Solo in questo caso, l'effetto della curvatura è "cotto" alla pinna, il che significa che ha i vantaggi meccanici di una curva anche quando è piatta. L'applicazione di una curvatura effettiva alla base della pinna amplificherebbe l'effetto di irrigidimento.
"Quindi regolando la curvatura, i pesci potrebbero alterare rapidamente e drammaticamente la forza con cui potrebbero spingere sull'acqua, che potrebbe renderli più manovrabili", ha detto Mandre.
I ricercatori affermano che il loro modello suggerisce interessanti possibilità per la progettazione di nuotatori robotici.
"Questi risultati ci aiutano a comprendere il significato funzionale della curvatura nelle pinne dei pesci, " Disse Mandre. "In questo modo, fornisce un principio di progettazione che possiamo potenzialmente utilizzare per lo sviluppo di appendici robotiche per la propulsione acquatica altamente manovrabile".