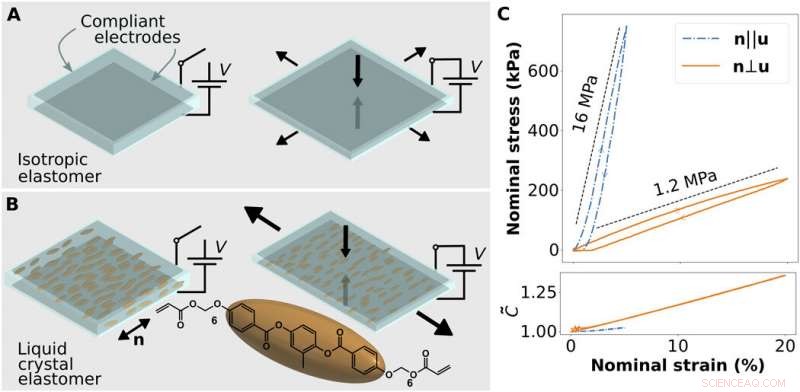
Schema del dispositivo, meccanico, e caratterizzazione elettrica. (A) Schema di un attuatore DE isotropo tradizionale negli stati off e on. (B) Schema di un attuatore LCE dielettrico allineato uniassiale (DLCEA) negli stati off e on. Allineamento molecolare dei cristalli liquidi; la regista, n, è indicato da una freccia a doppia punta e definisce la direzione più rigida della LCE. Quando azionato da una tensione, V, il materiale si assottiglia e si allunga perpendicolarmente all'allineamento più che parallelo al regista. (C) La sollecitazione meccanica DLCEA e la risposta della capacità normalizzata (C∼) alla deformazione nel regime lineare DLCEA sono caratterizzate a una velocità di deformazione dello 0,1% al secondo. Credito:progressi scientifici, doi:10.1126/sciadv.aay0855
Gli scienziati dei materiali mirano a utilizzare robot morbidi bioispirati per eseguire interazioni avanzate tra umani e robot, ma la tecnologia associata resta da sviluppare. Per esempio, gli attuatori morbidi devono funzionare rapidamente con forza per fornire cambiamenti di forma programmabili e i dispositivi devono essere facili da fabbricare ed efficienti dal punto di vista energetico per applicazioni non collegate. In un nuovo rapporto su Progressi scientifici , Zoey S. Davidson e un gruppo di ricerca interdisciplinare nei dipartimenti di Intelligenza Fisica, Scienze dei materiali e Ingegneria, e la Scuola di Medicina in Germania, Stati Uniti e Turchia, ha combinato diverse caratteristiche di interesse utilizzando due distinti sistemi di materiali attivi per costruire robot morbidi.
Gli scienziati hanno integrato un'attuazione rapida e altamente efficiente con elastomeri dielettrici (DE) e la programmabilità della forma diretta utilizzando elastomeri a cristalli liquidi (LCE). Utilizzando tecniche di fotoallineamento dall'alto verso il basso, hanno quindi programmato l'allineamento molecolare e localizzato l'anisotropia elastica gigante negli elastomeri a cristalli liquidi. I ricercatori hanno sviluppato monoliti di elastomeri a cristalli liquidi ad azionamento lineare con velocità di deformazione superiori al 120 percento, al secondo, e un'efficienza di conversione dell'energia del 20% quando si spostano carichi superiori a 700 volte il peso dell'elastomero. Il meccanismo consentirà nuove opportunità di ricerca in termini di programmabilità ed efficienza di forme miniaturizzate insieme a maggiori gradi di libertà per applicazioni nella robotica morbida nella ricerca multidisciplinare.
I ricercatori di robotica dei materiali considerano gli attuatori conformi la chiave mancante per creare interfacce efficienti tra uomo e robot. Gli attuatori morbidi conformi saranno idealmente altamente efficienti, mantenere il rapporto forza-peso, capacità di lavoro e programmabilità della forma per completare funzioni complesse. Gli attuatori morbidi con tali proprietà si comportano in modo molto simile a un muscolo artificiale con applicazioni avanzate nel settore aerospaziale, robotica, dispositivi medici, dispositivi per la raccolta di energia e nei dispositivi indossabili. Tra le varietà di attuatori soft esplorate, gli elastomeri dielettrici (DE) sono i più promettenti. In parallelo, gli elastomeri a cristalli liquidi (LCE) possono subire una deformazione meccanica reversibile mediante attivazione luminosa e termica vicino alla temperatura di transizione di fase. I progressi nel fotoallineamento e nella microfabbricazione hanno permesso agli scienziati di programmare in anticipo l'allineamento dei cristalli liquidi in regioni microscopiche per il morphing di forme complesse. Però, i meccanismi esistenti richiedono metodi di fabbricazione a più fasi, mentre gli sforzi per convogliare l'energia elettrica al lavoro meccanico utilizzando LCE sono limitati a causa del piccolo sforzo che generano.
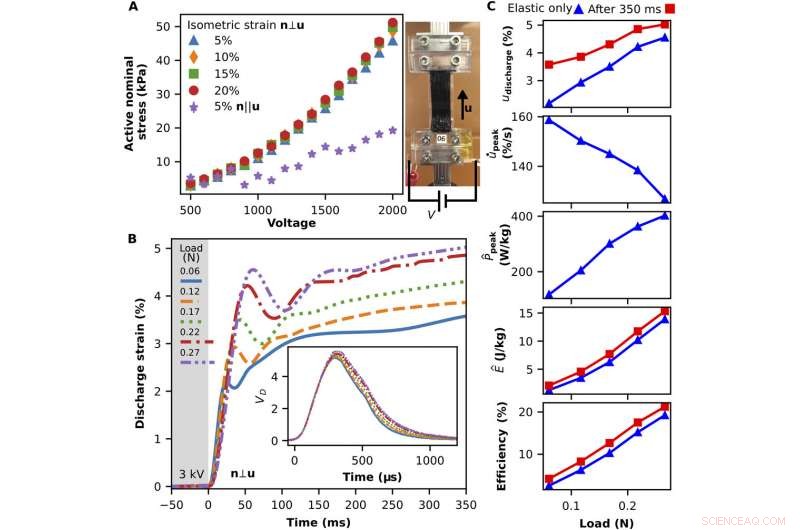
La caratterizzazione del DLCEA uniassiale dimostra le capacità di un dispositivo attuatore DLCEA. (A) Prove isometriche (deformazione costante). Riduzione della tensione nominale attiva misurata con varie deformazioni isometriche iniziali (u) per dispositivi assemblati con il direttore LCE n⊥u e n‖u e una fotografia di un dispositivo DLCEA assemblato con n⊥u. (B) Prove isotoniche (a forza costante). Traiettorie di deformazione di scarica contrattile sotto vari carichi misurate da una telecamera ad alta velocità con tensioni di attuazione di 3 kV. Riquadro:Le misurazioni corrispondenti della scarica elettrica. (C) Le caratteristiche fondamentali dell'attuatore sono calcolate dalla traiettoria di contrazione e dalla misurazione della corrente di scarica trovata in (B), compreso il ceppo (u), velocità di deformazione di picco (u˙peak), potenza specifica di picco (Pˆpeak), energia specifica (Eˆ), ed efficienza. Crediti fotografici:Zoey S. Davidson. Credito:progressi scientifici, doi:10.1126/sciadv.aay0855
Nel presente lavoro, Davidson et al. LCE modellato (elastomeri a cristalli liquidi) per adattare la variazione spaziale della conformità meccanica (trasferire una forza in ingresso e uno spostamento attraverso la deformazione del corpo elastico) e sviluppare attuatori elastomerici dielettrici più efficaci con pre-programmabilità e direzione di attuazione (compressione). Generalmente, Gli attuatori DE (elastomero dielettrico) funzionano utilizzando l'attrazione elettrostatica tra due elettrodi conformi creati sui lati opposti di un DE isotropico per progettare un condensatore-resistore variabile. L'alta tensione applicata agli elettrodi conformi può indurre una pressione elettrostatica nota come sollecitazione di Maxwell per deformare il DE; per l'azionamento elettrico. Questo meccanismo può produrre una maggiore efficienza operativa e una maggiore velocità di attuazione rispetto a quelli degli LCE. Però, nonostante alcuni risultati impressionanti, Gli attuatori DE non hanno ancora ottenuto un uso diffuso nella robotica morbida a causa delle sfide esistenti che possono essere superate utilizzando materiali innovativi per costruire la prossima generazione, DE ad alte prestazioni con programmabilità della forma.
Davidson et al. ha esplorato direttamente la grande anisotropia meccanica (per migliorare la localizzazione della deformazione) dei materiali LCE utilizzando l'attuazione elettrica, senza fare affidamento sulla rotazione molecolare. Hanno incluso i recenti progressi nella scienza dei materiali per costruire DE altamente efficienti e programmabili nella forma; denominati attuatori dielettrici LCE (DLCEA). Gli scienziati hanno allineato le molecole LCE nei domini locali per ottenere un'attivazione elettrica e consentire il morphing della forma a temperatura ambiente per dimostrare grandi, ceppi veloci e potenti.
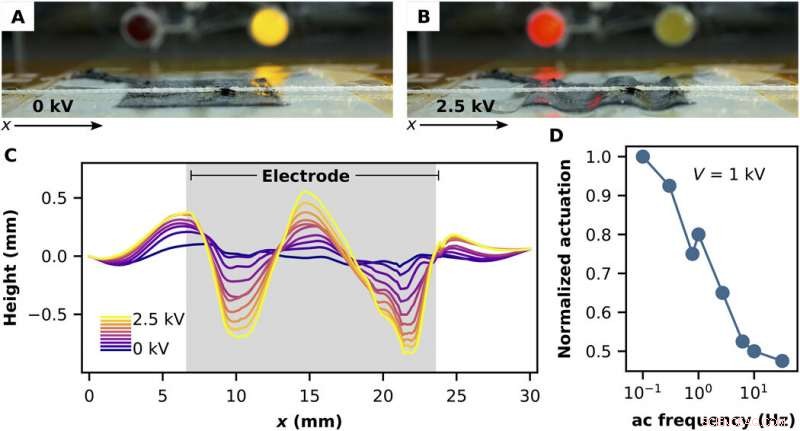
DLCEA di instabilità uniassiale fuori dal piano. (A) Off e (B) on stati di un dispositivo DLCEA uniassiale con condizione al contorno fissa. L'espansione lungo la direzione morbida crea instabilità fuori dal piano, che sposta un filo sottile tenuto teso attraverso la superficie. (C) Misura sperimentale dell'instabilità in funzione della tensione applicata. (D) Risposta in frequenza di instabilità uniassiale DLCEA a 1 kV. L'ampiezza di attuazione di 0,1 Hz è di circa 130 μm. Crediti fotografici:Zoey S. Davidson. Credito:progressi scientifici, doi:10.1126/sciadv.aay0855
Il team di ricerca ha sviluppato i film LCE in un processo in due fasi; primo, hanno sviluppato brevemente un oligomero, seguita dalla fabbricazione del film LCE utilizzando una reazione click tiolo-acrilato. Hanno messo a punto il rapporto esatto dei componenti, la scelta del monomero e del ditiolo linker, per regolare le proprietà meccaniche desiderate del film LCE finale. Il lavoro ha prodotto ampie aree di LCE uniassiale ben ordinato con grande anisotropia elastica. Gli scienziati hanno applicato elettrodi di grasso conformi su entrambi i lati della pellicola LCE per creare i dispositivi DLCEA (attuatore dielettrico LCE).
Davidson et al. quindi caratterizzato (testato) i materiali a partire da film LCE monodominio uniassialmente allineati. Prossimo, hanno testato i DLCEA uniassiali in configurazioni isometriche (deformazione costante) e isotoniche (forza costante). Per esempio, durante i test isometrici, hanno applicato le sollecitazioni iniziali ai dispositivi DLCEA e hanno permesso il rilassamento prima di applicare un'alta tensione per l'attuazione elettrica. Durante i test isopotenziali (dove ogni punto in una regione o spazio è allo stesso potenziale), gli scienziati hanno teso il DLCEA sotto una tensione costante per indicare l'attuazione prevista.
Dimostrazione di instabilità uniassiale DLCEA. Un DLCEA allineato uniassialmente si deforma quando viene caricato con un potenziale di 2,5 kV e quindi si appiattisce quando gli elettrodi vengono scaricati. La corda tenuta insegnata sul DLCEA aiuta a visualizzare l'attuazione ma è anche leggermente spostata dall'instabilità. Credito:progressi scientifici, doi:10.1126/sciadv.aay0855
Utilizzando lo stesso DLCEA, il team di ricerca ha eseguito test isotonici sospendendo una varietà di pesi dall'estremità libera del dispositivo per generare forze di carico costanti e deformazioni nominali iniziali. Hanno quindi scaricato improvvisamente il dispositivo DLCEA ponderato e catturato il movimento successivo utilizzando un video ad alta velocità. All'aumentare del carico sperimentale e della deformazione, la capacità di DLCEA è aumentata.
Durante l'attuazione di forme complesse, le condizioni al contorno hanno giocato un ruolo significativo nel determinare il cambiamento di forma del DLCEA. Il team di ricerca ha compreso il ruolo delle condizioni al contorno caratterizzando l'effetto di instabilità causato dall'espansione dell'elastomero tra confini fissi, hanno osservato un aumento dell'ampiezza di deformazione all'aumentare della tensione. Il picco di attuazione era anche un'altra caratteristica di interesse per le applicazioni DLCEA, gli scienziati hanno misurato la variazione dell'ampiezza di attuazione in funzione della frequenza applicata utilizzando un potenziale di 1 kV che varia in modo sinusoidale. Sebbene l'ampiezza di attuazione decada esponenzialmente con la frequenza, i ricercatori hanno misurato i parametri (50 µm) a 30 Hz e 1 kV.
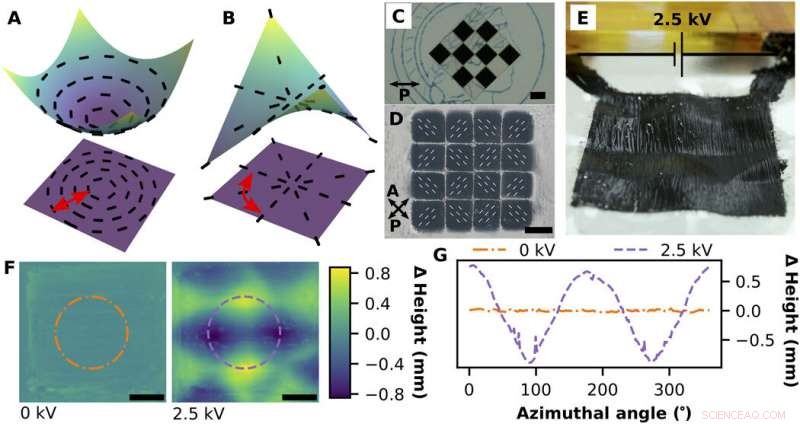
DLCEA pixelato. Attuazione della forma programmata, come una deformazione del modello di fossetta, è possibile modellando la configurazione del direttore in un reticolo di difetti azimutale-radiale. (A) I tipi di difetti azimutali si deformano in un cono con curvatura gaussiana localmente positiva, e (B) i tipi di difetto radiale si deformano in un anti-cono con curvatura gaussiana localmente negativa (a sella). In (A) e (B), le frecce rosse a doppia punta indicano la direzione morbida. (C) I difetti sono modellati utilizzando una matrice pixelata di pellicole polarizzanti con gli orientamenti locali progettati. (D) Visto attraverso polarizzatori incrociati, il film LCE fabbricato ha un allineamento uniassiale pixelato, indicato da linee bianche tratteggiate, formare un reticolo difettoso. (E) Quando caricato a 2,5 kV, c'è una grande deformazione visibile della superficie. (F) La mappa dell'altezza misurata profilometrica dell'LCE ricoperta di grasso è quasi piatta senza carica e varia di oltre 1,6 mm quando caricata a 2,5 kV. Il trattino-punto e i cerchi in (F) sono tracce di altezza rappresentate in (G). Il cambiamento da un'altezza approssimativamente costante ad un'altezza variabile sinusoidalmente indica un cambiamento di segno della curvatura gaussiana locale. Barre della scala, 4mm. Crediti fotografici:Zoey S. Davidson. Credito:progressi scientifici, doi:10.1126/sciadv.aay0855
Per poi dimostrare la capacità di preprogrammare modelli complessi in 2-D, seguito dall'attivazione elettrica dei film in forme 3D, gli scienziati hanno progettato configurazioni del direttore LCE spazialmente variabili. Hanno osservato che il film LCE si deforma fuori dal piano con una curvatura gaussiana localmente positiva o negativa per formare coni o deformazioni anti-cono in mezzi elastici. Davidson et al. osservato il cambiamento di altezza localmente programmato e la formazione di accompagnamento della curvatura gaussiana nel dispositivo sperimentale. I ricercatori attribuiscono l'elevata efficienza osservata nel sistema all'anisotropia del modulo elastico e al rapporto di Poisson. L'anisotropia del rapporto di Poisson del materiale è una caratteristica importante che può consentire l'attuazione programmata del cambio di forma. Per meccanismo, l'LCE azionato o compresso può espandersi trasversalmente per creare un cambio di forma. Il metodo sperimentale sviluppato in questo lavoro può essere generalizzato per creare una grande varietà di cambiamenti di forma programmabili. Di conseguenza, quando viene applicato un campo elettrico al DLCEA, il dispositivo può produrre movimenti contorti, dove la grandezza dipenderà dalle proprietà intrinseche del materiale e dalla geometria LCE.
In questo modo, Zoey S. Davidson e colleghi hanno combinato le caratteristiche desiderate di DE e LCE all'interno di un'unica piattaforma di materiale per formare DLCEA ad azionamento elettrico con prestazioni di attuazione superiori. I dispositivi hanno mostrato un'elevata efficienza di conversione dell'energia (20 percento), un'elevata velocità di attuazione (120 percento al secondo) e un cambio di forma programmabile da 2-D a 3-D con più di 1, 800 per cento di corsa fuori dal piano. Per forze di azionamento maggiori, il team di ricerca considera gli stack DLCEA multistrato.
Le intuizioni fornite in questo lavoro sulle tecniche di integrazione dei materiali attivi e sui meccanismi di elettroattuazione possono offrire opportunità più interessanti. I metodi possono essere abbinati alla stampa 3D, strategie di attuazione di origami e kirigami per creare robot morbidi multifunzionali con materiali a basso costo e sostenibili come invenzioni frugali. Il meccanismo sviluppato può essere applicato anche ad altre tecnologie come la raccolta e lo stoccaggio di energia, per dispositivi medici, tecnologia indossabile e aerospaziale.
© 2019 Scienza X Rete