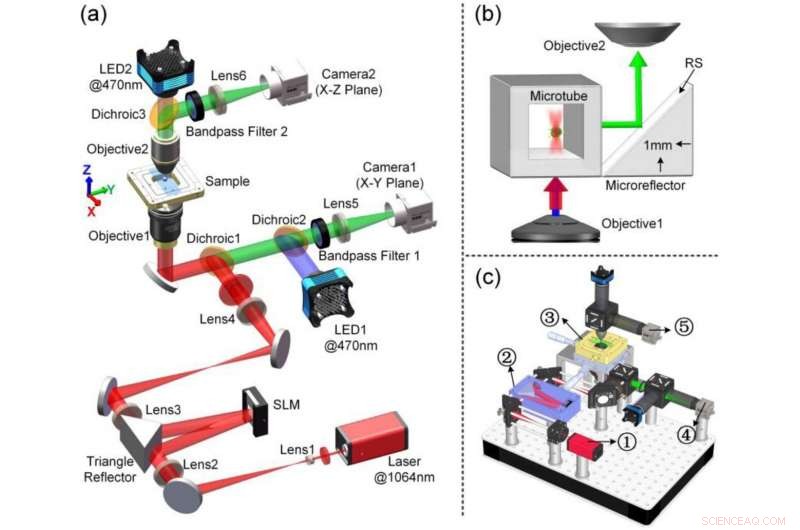
Schema dell'intrappolamento ottico simultaneo e dell'imaging fluorescente nel piano assiale. Credito:XIOPM
La cattura ottica è diventata uno strumento potente in numerosi campi come la biologia, fisica, chimica. Nell'interazione luce-materia, il trasferimento del momento lineare ottico e del momento angolare dà origine a forze ottiche che agiscono sull'oggetto illuminato, consentendo così l'accelerazione, confinamento tridimensionale (3-D), Filatura, rotazione, e persino l'estrazione negativa delle particelle.
Nei sistemi di intrappolamento ottico convenzionali, intrappolamento e imaging condividono lo stesso obiettivo, confinando la regione di osservazione al piano focale. Per la cattura di processi di intrappolamento ottico che si verificano in altri piani, soprattutto il piano assiale (quello che contiene l'asse z) è ancora una sfida. Come risolvere la limitazione dell'acquisizione delle informazioni sul piano assiale nel sistema ottico di intrappolamento del piano assiale?
Un team di ricerca guidato dal Prof. Dr. Yao Baoli dell'Istituto di ottica e meccanica di precisione di Xi'an (XIOPM) dell'Accademia cinese delle scienze (CAS) ha sviluppato un sistema di pinzette ottiche che consente l'intrappolamento ottico e l'imaging simultaneo nel piano assiale . Utilizzando questa tecnologia, hanno studiato l'intrappolamento sul piano assiale e le prestazioni di imaging in vari campi ottici, compreso Bessel, arioso, e travi a forma di serpente. I risultati sono stati pubblicati in Rapporti sui progressi in fisica .
Nel loro schema, un micro-riflettore rivestito d'argento ad angolo retto è stato utilizzato per realizzare l'imaging sul piano assiale, con cui la fluorescenza emessa viene riflessa dallo smusso argentato del microriflettore nell'obiettivo di imaging. Con l'uso di un tale dispositivo, migliori prestazioni di imaging sono state ottenute con una minore aberrazione sferica, coma, e l'astigmatismo rispetto ad altre tecniche come l'uso di un microprisma.
Per realizzare un intrappolamento 3-D stabile e una sofisticata micromanipolazione dinamica nel piano assiale, è stato proposto un algoritmo di Gerchberg-Saxton (GS) modificato basato sulla trasformata di Fourier sul piano assiale (FT). Combinando questo algoritmo e l'imaging sul piano assiale, hanno dimostrato i versatili HOT sul piano assiale e hanno studiato l'intrappolamento e le prestazioni di guida dei fasci non diffrangenti, compreso Bessel, arioso, e travi a forma di serpente.
La tecnica di intrappolamento e imaging simultaneo sul piano assiale estende notevolmente l'intervallo di intrappolamento, consentendo l'osservazione dell'intrappolamento nel piano assiale. Per di più, è una tecnologia fondamentale per lo studio di altri campi, compresa la trazione ottica, rilegatura ottica longitudinale, microscopia di fase tomografica, e microscopia a super risoluzione.