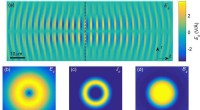
Il modello della visione stereo binoculare. Credito:Optics Express (2022). DOI:10.1364/OE.470391
I servizi basati sulla posizione stanno diventando sempre più importanti negli ambienti interni con lo sviluppo delle tecnologie Internet-of-thing (IoT). Il sistema di posizionamento della luce visibile (VLP) offre un grande potenziale grazie alla sua immunità alle interferenze elettromagnetiche indotte dalle radiofrequenze, uno spettro libero e illimitato e un livello di sicurezza molto più elevato.
Recentemente, molti lavori di ricerca sul VLP in linea di vista (LOS) sono stati dimostrati con un'elevata precisione a costi molto bassi. Tuttavia, per LOS VLP, il blocco e lo shadowing rappresentano un grosso problema; e vi è la necessità di un gran numero di LED. Sono stati studiati pochi metodi per risolvere questo problema.
In uno studio pubblicato su Optics Express , il gruppo del Dr. Lin Bangjiang del Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences ha proposto un sistema VLP non in linea di vista (NLOS) che utilizza una fotocamera binoculare e un singolo diodo a emissione di luce (LED) . Può realizzare il posizionamento 3D di alta precisione di una postura arbitraria dalle luci riflesse dal pavimento.
I ricercatori hanno proposto un modello di sistema che consiste in due moduli funzionali:un modulo di comunicazione con telecamera ottica (OCC) NLOS e un modulo di visione stereo binoculare. Il primo utilizza le riflessioni per ricevere le informazioni sulle coordinate del LED da un modello di recupero del segnale OCC migliorato. E il successivo stima la posizione della telecamera mediante un algoritmo di stima della posizione binoculare proposto, che si basa sui principi della visione stereo binoculare.
Hanno quindi proposto un algoritmo di compensazione dell'errore per ottimizzare l'errore del sistema sull'asse z, che è il problema chiave sulla stima della profondità per la fotocamera binoculare che l'errore sull'asse z è di gran lunga maggiore di quello su x e y assi.
Inoltre, i ricercatori hanno progettato un banco di prova sperimentale e hanno scelto un'unità microcontrollore STM32 per pilotare un LED. Al ricevitore, hanno utilizzato una fotocamera binoculare per catturare le luci riflesse dal suolo in due diverse modalità di esposizione (una lunga e una corta).
Hanno ottenuto la posizione del LED dal modulo NLOS OCC utilizzando l'immagine a breve esposizione e hanno ottenuto le coordinate pixel della proiezione del LED riflessa dal suolo nell'immagine a lunga esposizione. Un'unità di misura inerziale è fissata insieme alla fotocamera binoculare per misurarne la posa.
Utilizzando queste informazioni, i ricercatori hanno calcolato l'errore tra il valore di stima e il valore misurato della posizione della telecamera.
Questo studio supera la sfida dell'ombreggiamento/blocco dei collegamenti LOS, realizza il posizionamento arbitrario dell'assetto 3D con il numero minimo di beacon (solo un singolo LED) e migliora notevolmente la praticabilità di VLP. + Esplora ulteriormente