L'integrazione della memoria meccanica sotto forma di molle si è rivelata per centinaia di anni una tecnologia abilitante fondamentale per i dispositivi meccanici (come gli orologi), ottenendo funzionalità avanzate attraverso movimenti autonomi complessi. Attualmente, l'integrazione delle molle nella microtecnologia basata sul silicio ha aperto il mondo dei dispositivi meccatronici planari producibili in serie da cui tutti traiamo vantaggio, ad esempio tramite i sensori degli airbag.
Per una nuova generazione di applicazioni biomediche minimamente e persino non invasive, tuttavia, i dispositivi mobili in grado di interagire meccanicamente in modo sicuro con le cellule devono essere realizzati su scale molto più piccole (10 micron) e con forze molto più morbide (scala pico-Newton, ovvero sollevando meno pesi inferiore a un milionesimo di mg) e in forme tridimensionali personalizzate.
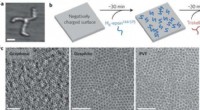
Ricercatori della Chemnitz University of Technology, dello Shenzhen Institute of Advanced Technology dell'Accademia cinese delle scienze e del Leibniz IFW Dresden, in una recente pubblicazione su Nature Nanotechnology , hanno dimostrato che le molle controllabili possono essere integrate in posizioni scelte arbitrarie all'interno di strutture tridimensionali morbide utilizzando la produzione fotolitografica confocale (con precisione su scala nanometrica) di un nuovo materiale magneticamente attivo sotto forma di fotoresist impregnato con densità personalizzabili di nanoparticelle magnetiche.
Queste "picomolle" hanno una flessibilità straordinariamente ampia e sintonizzabile e possono essere controllate a distanza attraverso campi magnetici (anche nelle profondità del corpo umano) consentendo il movimento articolato nei microrobot e le micromanipolazioni ben oltre lo stato dell'arte.
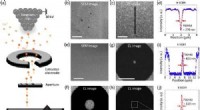
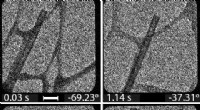
Inoltre, l'estensione delle picomolle può essere utilizzata anche visivamente per misurare forze, ad esempio forze di propulsione o di presa, in interazione con altri oggetti come le cellule. Ad esempio, queste picomolle sono state utilizzate per misurare la forza di propulsione locomotiva degli spermatozoi.
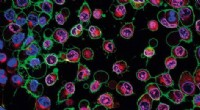
La pubblicazione mette in mostra queste capacità dimostrando diversi microbot (incluso un micropinguino) contenenti picomolle in più posizioni che possono svolgere questi compiti su scala cellulare:spingersi, afferrare e rilasciare cellule e misurare le piccole forze necessarie per farlo in sicurezza.

Il dottor Haifeng Yu, primo autore dello studio e leader del gruppo presso l'Accademia cinese delle scienze a Shenzhen (Cina), afferma:"L'elasticità programmabile su scala micrometrica offre una strategia fattibile per la produzione di dispositivi 3D e 'micro-chirurghi' finemente strutturati in grado di eseguire compiti medici complessi."
La Dott.ssa Mariana Medina-Sanchez, leader del gruppo presso Leibniz IFW e BCUBE-TU Dresden, coautrice e co-supervisore di questo lavoro, aggiunge:"Queste micromacchine basate su picospring con elasticità e magnetismo programmabili, realizzate attraverso la fabbricazione monolitica, si aprono numerose possibilità per il rilevamento e l'attuazione di forze localizzate in ambienti a basso numero di Reynolds. Questa versatilità ne sottolinea l'importanza in uno spettro di applicazioni biomediche."
Il professor Oliver Schmidt, che è l’ultimo autore dell’articolo e ha supervisionato questo lavoro, vede questo come un altro passo importante nella transizione verso la microrobotica modulare morbida e intelligente pronta per la vita. "I microdispositivi controllati a distanza che utilizzano campi magnetici costituiscono una tecnologia particolarmente promettente per applicazioni mediche non invasive, e ora questa si estende ai meccanismi meccanici all'interno di questi microdispositivi remoti", afferma Schmidt.
"La possibilità di incorporare molle progettate aggiungerà anche un nuovo strumento alle crescenti capacità della TU Chemnitz verso la morfogenesi microelettronica e la vita artificiale", aggiunge il Prof. John McCaskill, coautore dello studio, membro del Centro di ricerca MAIN e fondatore direttore del Centro europeo per la tecnologia vivente.
Ulteriori informazioni: Haifeng Xu et al, microrobot morbidi nanofabbricati in 3D con molle picoforce super conformi come sensori e attuatori integrati, Nature Nanotechnology (2024). DOI:10.1038/s41565-023-01567-0
Informazioni sul giornale: Nanotecnologia naturale
Fornito dall'Università di Tecnologia di Chemnitz