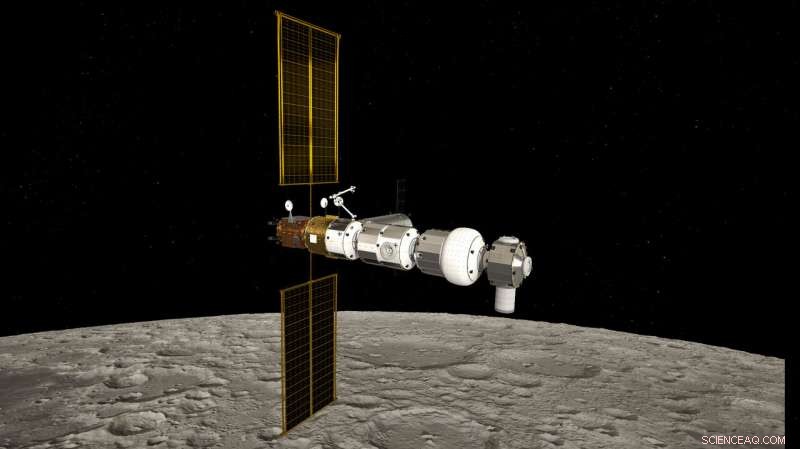
Rappresentazione artistica del Gateway sopra la luna. Il Gateway è la prossima struttura lanciata dai partner della Stazione Spaziale Internazionale. Credito:ESA/NASA/ATG Medialab
Questo autunno vedrà una serie di esperimenti che controllano i robot da lontano, con l'astronauta dell'ESA Luca Parmitano alla guida di un robot nei Paesi Bassi e gli ingegneri in Germania che controllano un rover in Canada.
Immagina di guardare la Luna dal Gateway mentre ti prepari ad atterrare vicino a una base lunare per eseguire esperimenti, ma sai che la base necessita di lavori di manutenzione sul sistema di supporto vitale che richiederanno giorni. Sarebbe meglio mantenere la base dall'orbita in modo che gli astronauti possano mettersi subito al lavoro una volta sulla Luna.
Le partnership uomo-robot sono al centro della strategia di esplorazione dell'ESA, che include la preparazione per scenari come questo inviando esploratori robotici sulla Luna e sui pianeti, mano nella mano con gli astronauti che li controllano dall'orbita.
Il progetto Meteron è stato creato per sviluppare la tecnologia e il know-how necessari per far funzionare i rover in queste condizioni difficili. Copre tutti gli aspetti delle operazioni, dalle comunicazioni e l'interfaccia utente alle operazioni di superficie e persino il collegamento dei robot agli astronauti tramite il senso del tatto.
Controllo robotico storico
Il primo esperimento è avvenuto nel 2012 quando l'astronauta della NASA Sunita Williams ha controllato un rover LEGO in Germania per testare uno "space internet" di recente sviluppo, dimostrando che è possibile controllare un rover dall'orbita. Non è un'impresa facile poiché i segnali dalla Stazione Spaziale Internazionale compiono un viaggio di andata e ritorno di 144 400 km. Mentre l'avamposto si muove intorno alla Terra a 29 000 km/h, i segnali viaggiano fino ai satelliti alti quasi 36 000 km e poi giù fino a una stazione terrestre statunitense nel New Mexico, tramite la NASA Houston e attraverso un cavo transatlantico verso l'Europa e ritorno.
Mocup è uno dei test rover dell'iniziativa dell'ESA per future missioni sulla Luna, Marte e altri corpi celesti. Credito:Agenzia spaziale europea
In parallelo, gli ingegneri hanno lavorato per progettare l'interfaccia utente per consentire agli astronauti di controllare i robot. Trattandosi di un nuovo campo, aspetti come la visuale della telecamera, joystick e anche se utilizzare un computer tradizionale o un touch-screen doveva essere considerato e progettato.
Dai primi test, rover più grandi come Eurobot sono stati controllati dallo spazio mentre i team del centro tecnico dell'ESA nei Paesi Bassi hanno iniziato a sperimentare con feedback tattile, permettendo agli astronauti di sentire ciò che tocca il robot. Nel 2015, una storica "stretta di mano" orbitale si è verificata tra l'astronauta della NASA Terry Virts e una persona sulla Terra a oltre 5000 km di distanza.
A pochi mesi da quel traguardo, L'astronauta dell'ESA Andreas Mogensen ha controllato un rover per inserire con precisione millimetrica un piolo di metallo in un foro rotondo in una "task board". simulando la riparazione di un collegamento elettrico.

L'astronauta dell'ESA Andreas Mogensen si sta preparando per il suo volo di 10 giorni verso la Stazione Spaziale Internazionale a settembre, che lo vedrà testare molte nuove tecnologie. Ha incontrato il rover Eurobot presso il centro tecnico dell'ESA a Noordwijk, Paesi Bassi, martedì per la prima volta. Credito:ESA-J. Harrod
I test sono proseguiti con crescente fedeltà. La settimana scorsa, un team dell'ESA a terra insieme all'Agenzia spaziale canadese ha praticato le operazioni notturne. Esperti del centro di controllo missione dell'ESA a Darmstadt, Germania, controllava il rover Juno del CSA dall'altro lato dell'Oceano Atlantico, con un team scientifico presso il centro tecnico ESTEC dell'ESA nei Paesi Bassi che consiglia:una configurazione simile viene utilizzata per le operazioni quotidiane della Stazione Spaziale Internazionale.
L'esperimento di quattro ore ha visto Giunone viaggiare per oltre due chilometri coprendo sei "waypoint" mentre effettuava scansioni dell'ambiente circostante e ispezionava aree di interesse scientifico. Nessuna delle squadre in Europa sapeva esattamente cosa aspettarsi, proprio come farebbero durante una vera missione lunare.
"L'esperimento MAGIC è stato davvero un enorme successo, "dice Kim Nergaard, Capo dei concetti avanzati di missione presso il centro operativo ESOC dell'ESA a Darmstadt, Germania.
"Ovviamente abbiamo affrontato alcuni problemi:a un certo punto il rover è stato eccessivamente cauto con una roccia relativamente piccola, ma abbiamo raggiunto il nostro punto finale entro il tempo assegnato e raggiunto tutti gli obiettivi che ci eravamo prefissati, imparando molto lungo la strada."
Mettere tutto insieme
A novembre 2019, il progetto Meteron metterà insieme tutti gli elementi quando l'astronauta dell'ESA Luca Parmitano gestirà il rover Interact nei Paesi Bassi dalla Stazione Spaziale Internazionale.
Questo esperimento, soprannominato Analog-1, unirà tutto il know-how di un decennio del progetto Meteron in un test su vasta scala:far funzionare un rover dall'orbita per raccogliere campioni scientifici di roccia lunare. Luca avrà una squadra al centro astronautico d'Europa a Colonia, Germania, fungendo da controllo della missione e sarà in grado di sentire ciò che Interact sente utilizzando la tecnologia di feedback aptico sviluppata dal Laboratorio di Telerobotica dell'ESA.