 Crusher veicolo terrestre senza equipaggio Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Crusher veicolo terrestre senza equipaggio Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Crusher ha fatto il suo debutto in vero stile monster truck:i due prototipi sono entrati in un edificio della Carnegie Mellon University con musica a tutto volume e luci lampeggianti. Un Crusher è rimasto in piedi mentre la sua controparte procedeva a ribaltare e schiacciare pile di auto che avrebbero fatto retrocedere la maggior parte dei monster truck con la coda tra le gambe. Crusher non è un camion tipico. Può guidare fino a un muro verticale di 4 piedi mentre trasporta 8, 000 libbre di carico.
Crusher è un veicolo terrestre senza equipaggio ( UGV ) finanziato dalla DARPA e progettato dal National Robotics Engineering Center di Carnegie Mellon ( NREC ). La spinta del progetto Crusher, che si basa su un altro UGV progettato da NREC chiamato Spinner (a volte viene chiamato Crusher Spinner versione 2.0 ) – è praticamente la spinta di tutta la ricerca e sviluppo finanziata dai militari nel mondo UGV in questo momento:maggiori capacità di percezione, autonomia e robustezza. L'esercito degli Stati Uniti vorrebbe poche cose più di un senza equipaggio, serbatoio silenzioso che può trasportare un carico utile illimitato, difendersi dal nemico e sfrecciare senza ostacoli su un terreno che farebbe raggomitolare l'Hummer in posizione fetale.
Probabilmente il Crusher non vedrà mai la produzione di massa. Il costo sarebbe troppo alto (i progettisti non citano nemmeno un numero). È progettato come un prototipo funzionante per testare varie tecnologie che NREC sta sviluppando come parte di un programma chiamato UPI .
UPI sta per tu Veicolo da combattimento terrestre con equipaggio P erceptOR (fuoristrada) io integrazione, un boccone finanziato dalla DARPA che comprende esperimenti per "valutare le capacità su larga scala, veicoli terrestri senza equipaggio (UGV) che operano autonomamente in una vasta gamma di complessi, fuoristrada" [rif]. Il Crusher da 6,5 tonnellate pesa quasi il 30 percento in meno di Spinner e può trasportare più carico. L'unica cosa che il NREC ha lasciato fuori dall'aggiornamento di Spinner è la capacità di continuare a viaggiare se viene capovolto Nessuna parola sul motivo per cui quella fantastica funzione è scomparsa, anche se la logica suggerirebbe che fosse o per rendere possibili alcune delle altre funzioni aggiornate di Crusher o per tagliare una capacità ad alto costo che potrebbe non essere cruciale per la missione principale di UPI.
Così, cosa può fare Crusher?
 Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Secondo il NREC, La tecnologia di Crusher dura dai sei ai dieci anni dall'implementazione nel mondo reale. Mentre più piccolo, i robot controllati dall'uomo sono già arrivati sul campo di battaglia (vedi How Military Robots Work), massiccio, robot senza equipaggio come Crusher sono ancora nei laboratori. La complessità dei sistemi di percezione e controllo necessari a un robot su larga scala per gestire terreni e condizioni sconosciuti è ancora in fase di ricerca e sviluppo. I sistemi di percezione e navigazione di Crusher sono prototipi intesi come piattaforme di test per approcci sempre più innovativi ai veicoli da combattimento a terra che non richiedono alcun input umano per svolgere la loro missione.
Nella sezione successiva, daremo un'occhiata ad alcuni di questi sistemi. Poiché Crusher è prima di tutto un progetto militare, i dettagli completi non sono disponibili per il pubblico in generale, ma HowStuffWorks è riuscita comunque a scoprire alcune informazioni interessanti.
 Prototipi di frantoio Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Prototipi di frantoio Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Ci sono tre aree principali di interesse nello sviluppo di Crusher:
Lo scheletro di Crusher è realizzato in alluminio e titanio. Il suo scafo è un cornice spaziale in alluminio (una struttura aperta di bielle) con nodi in titanio ultra-robusti che uniscono le aste per una maggiore resistenza nel probabile caso di collisioni con grandi, oggetti duri. Immediatamente sotto lo scafo c'è una piastra paramotore - fondamentalmente un sospeso, "paraurti" in acciaio antiurto che si pone come prima difesa, proteggere lo scafo dal contatto iniziale con massi, ceppi e gradini d'albero.
 Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
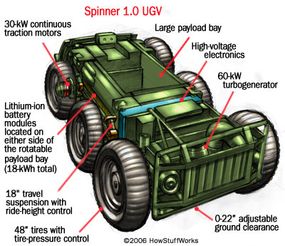
Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Per mantenerlo in movimento su ostacoli e terreni generalmente ostili, Crusher sfoggia un sei ruote, sistema di trazione integrale alimentato da a ibrido diesel-elettrico configurazione che consente un funzionamento quasi silenzioso - una caratteristica utile nel lavoro di ricognizione. Un 78 cavalli, il motore turbodiesel funge da generatore nel sistema, emettendo una potenza continua di 58 kilowatt (kW) per caricare i 300 volt di Crusher, 18,7 kW, pacco batteria agli ioni di litio. Le batterie a loro volta azionano sei motori elettrici da 210 kW, uno situato in ciascuno dei sei mozzi delle ruote. Ogni motore produce 282 cavalli. Come la maggior parte dei sistemi elettrici ibridi, Crusher utilizza la frenata rigenerativa per restituire un po' di energia alle batterie ogni volta che rallenta (vedi Come funzionano le auto ibride per informazioni sulla frenata rigenerativa). Il veicolo può funzionare con la sola alimentazione silenziosa della batteria per 2-10 miglia (da 3 a 16 km) a seconda della velocità e del carico di carico.
Poiché ogni ruota è alimentata in modo indipendente, se uno o due muoiono, Crusher può andare avanti. Ha bisogno solo di quattro delle sei ruote per mantenere le sue capacità. E se si trova all'improvviso nel bisogno di una svolta, diciamo, circondato su tre lati da barriere invalicabili - può usare il suo capacità di sterzata , un raggio di sterzata pari a zero, per voltare pagina rapidamente senza alcun margine di manovra.
Per adattarsi a ostacoli bassi, affrontare terreni rocciosi o meglio nascondersi dal nemico, Crusher ha un'altezza di marcia regolabile da zero a 30 pollici (76 cm). Oltre alla regolazione in altezza, La sospensione di Crusher può viaggiare per ben 30 pollici per assorbire gli urti, ed è dotato di rigidità regolabile per le diverse condizioni del terreno. Siamo stati in grado di individuare una vista da sotto il cofano di Spinner, Il predecessore di Crusher - ricorda che Crusher è una versione aggiornata di Spinner 1.0:
 Il frantoio presenta aggiornamenti nella regolazione dell'altezza di marcia, viaggio in sospensione, peso del veicolo e capacità di carico.
Il frantoio presenta aggiornamenti nella regolazione dell'altezza di marcia, viaggio in sospensione, peso del veicolo e capacità di carico. Il potente telaio di Crusher, la configurazione a sei ruote motrici e le capacità di sospensione estreme consentono all'UGV di viaggiare ad alta velocità, attualmente fino a 26 mph (42 km/h), su terreni difficili, affrontare ostacoli come fossi, massi, pendenze ripide e barriere verticali fino a 4 piedi, il tutto senza perdere un colpo.
Robustezza, potenza e silenzio fanno di Crusher uno strumento di ricognizione ideale, ma è principalmente il sistema di autonomia dell'UGV che la DARPA ha finora sborsato 35 milioni di dollari per sviluppare. Il NREC non ha rilasciato molte informazioni dettagliate sul sistema UPI, ma afferma che "questa tecnologia diffonde le capacità di rilevamento su tutto il veicolo per aiutare a bilanciare la sua percezione e supportare anche le aree del veicolo che potrebbero essere meno abili nel rilevamento dell'ambiente. Il software [di rilevamento] consentirà anche a Crusher di "imparare" e applicare le informazioni raccolte in precedenza a nuovi ostacoli».
Sappiamo che l'hardware di percezione consiste principalmente di LADAR (rilevamento laser e distanza) unità e array di telecamere . Un'unità LADAR invia un raggio laser per scansionare un'area e misura il tempo necessario affinché il raggio venga riflesso al sensore laser dell'unità. Crusher ha otto di queste unità:quattro scansionano l'ambiente orizzontalmente e quattro scansionano verticalmente. Utilizza sei coppie di telecamere stereo per la percezione della profondità e quattro telecamere a colori per applicare un pixel di colore a ciascun punto di distanza determinato dal sensore LADAR.
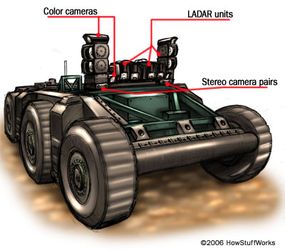 Prima versione del sistema di percezione di Crusher
Prima versione del sistema di percezione di Crusher L'incarnazione più recente di Crusher presenta un 18 piedi albero telescopico per raccogliere dati da un punto di vista più elevato. L'albero può incorporare parti del LADAR e del gruppo telecamera visti sopra, oppure può semplicemente aggiungere un ulteriore set di sensori al sistema di percezione.
 Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Con tutti i dati LADAR e della telecamera combinati, Crusher's CPU integrata crea un'immagine 3D del paesaggio in cui sta viaggiando Crusher. La CPU è un Pentium 3 a 700 MHz che controlla le attività meccaniche di Crusher ed esegue il software di navigazione che gestisce l'elaborazione dei dati dei sensori. Un unità di misura inerziale ( IMU ) rileva l'altitudine del Crusher, posizione e direzione del movimento utilizzando una combinazione di accelerometri (sensori di inclinazione) e giroscopi, quindi Crusher è sempre consapevole del proprio movimento e della propria posizione rispetto al paesaggio. L'UGV ha anche un ricevitore GPS integrato e un database GPS basato su computer che include dati del terreno preprogrammati.
Finora, esperimenti sul campo hanno dimostrato che Crusher è sulla buona strada per una vera autonomia. Nella prova, Crusher si è spostato da un waypoint GPS a un waypoint GPS distanziato di più di 0,6 miglia (1 km) senza alcun controllo esterno. Usando i suoi sistemi di percezione e navigazione, Il frantoio può reagire agli ostacoli al volo:non ha bisogno di un operatore che gli dica cosa fare quando colpisce qualcosa. Può salire una pendenza maggiore di 40 gradi, guidare su un gradino di 4 piedi e attraversare una trincea di 80 pollici utilizzando le proprie capacità decisionali. L'abilità nell'attraversare la trincea è particolarmente interessante:i pneumatici di Crusher sono montati in modo tale da potersi abbassare per sostenere il veicolo mentre attraversa uno spazio vuoto.
 Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica Specifiche del frantoio :
Le specifiche di dimensioni e peso significano che un singolo aereo cargo C-130H può trasportare due Crusher in battaglia in qualsiasi parte del mondo. Ad agosto 2006, Crusher è stato dotato di una montatura Rafael Mini Typhoon che contiene un fucile calibro .50, indicando la possibilità che i ruoli di combattimento possano diventare un focus sempre più importante nello sviluppo della tecnologia dell'autonomia per i veicoli militari. Nella sezione successiva, daremo uno sguardo al futuro del prototipo Crusher e scopriremo come si adatta alla tendenza generale della ricerca e dello sviluppo militare.
 Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica
Foto per gentile concessione di Carnegie Mellon, Centro nazionale di ingegneria robotica A partire dal 2006, l'esercito americano ha schierato circa 4, 000 robot da battaglia per il servizio attivo. I militari usano questi robot principalmente per "annusare" bombe e pulire edifici e altre strutture chiuse. dell'esercito Sistemi di combattimento futuri ( FCS ) sta cercando di spendere circa $ 300 milioni per finanziare aggiornamenti per espandere i ruoli dei robot sul campo di battaglia. L'FCS cerca muli robotici in grado di trasportare merci insieme alle truppe su terreni irregolari e veicoli senza equipaggio molto più grandi in grado di operare senza l'intervento umano nelle aree di ricognizione e pattugliare i confini, inviando dati cruciali alle truppe. Se questi grandi, i veicoli autonomi possono anche trasportare enormi carichi utili su terreni difficili senza perdere velocità, sarebbe un vantaggio in più. Crusher o qualcosa del genere sarebbe l'ideale in questi ultimi ruoli.
Lo stesso Crusher probabilmente non vedrà la distribuzione. È principalmente un progetto di ricerca e sarà in fase di test e sperimentazione fino al 2008. A quel tempo, il NREC consegnerà la tecnologia Crusher alla DARPA in modo che possa essere applicata a progetti correlati, la maggior parte dei quali rientra nel dominio del Future Combat System. L'FCS sta eseguendo programmi di sviluppo come l'Armed Reconnaissance Vehicle (ARV), che mira a realizzare una piena autonomia, veicolo pronto per la battaglia per missioni di ricognizione; e il Sistema di Navigazione Autonomo (ANS), un programma globale per sviluppare capacità di autonomia su piattaforma comune per un'ampia gamma di robot militari. L'obiettivo generale di FCS è la perfetta integrazione di veicoli con e senza equipaggio, terra e aria, in una struttura gestibile tramite un unico, sistema di controllo simile al web.
Tramite FCS, potremmo vedere veicoli simili a Crusher che supportano le truppe nelle operazioni di battaglia tra cinque e dieci anni. Molto probabilmente inizieranno in ruoli di ricognizione e poi passeranno al combattimento, sostenere le truppe invece di sostituirle. Ma la tecnologia di autonomia all'avanguardia di Crusher non è specifica militare. Il NREC prevede – e ha in cantiere – progetti di ricerca che utilizzano i sistemi sviluppati per Crusher in applicazioni civili. In un decennio, potremmo vedere veicoli autonomi svolgere compiti rischiosi in aree come l'agricoltura, miniere e costruzioni, alla fine trasferendo parte del pericolo affrontato dagli esseri umani in questi campi su controparti robotiche sostituibili che non provano dolore.
Per ulteriori informazioni su Crusher, UGV e argomenti correlati, controlla i link nella pagina successiva.
Fonti














