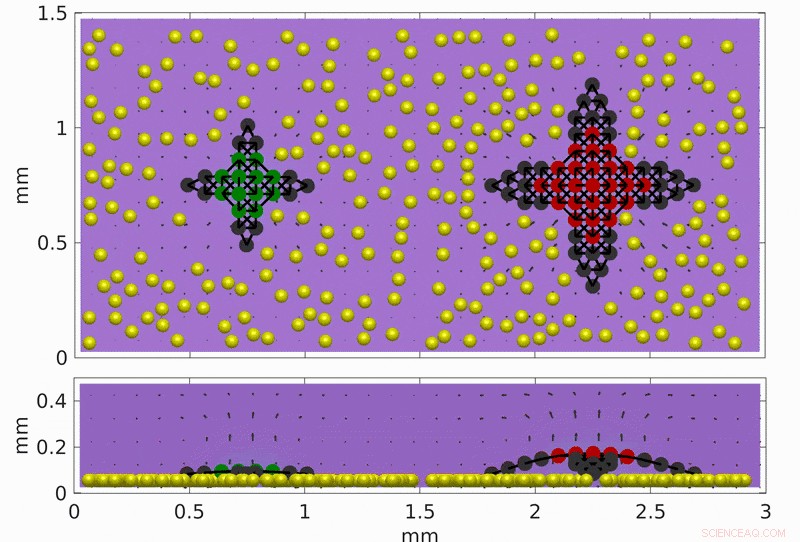
La superficie dei siti attivi sul granchio rosso è doppia rispetto a quella del granchio verde; perciò, il granchio rosso allontana le particelle dai concorrenti verdi generando flussi interni più forti (contrassegnati da frecce nere). Credito:Abhrajit Laskar/Anna Balazs
La collaborazione e la competizione sono istinti fondamentali tra le specie biologiche, dai più semplici organismi unicellulari ai rettili, pesci e primati, così come gli umani. Questo comportamento dinamico, il risultato di milioni di anni di evoluzione, è difficile da replicare nei sistemi sintetici. Però, gli ingegneri chimici della Swanson School of Engineering dell'Università di Pittsburgh hanno ricreato queste risposte in un ambiente di particelle microscopiche, fogli, e catalizzatori, imitando efficacemente le risposte di alimentazione, battagliero, e in fuga.
La loro ricerca, "Collaborazione e completamento tra fogli attivi per particelle semoventi, " è stato pubblicato questa settimana in Atti dell'Accademia Nazionale delle Scienze . L'investigatore principale è Anna C. Balazs, la cattedra John A. Swanson e illustre professore di ingegneria chimica e petrolifera presso la Swanson School. L'autore principale è Abhrajit Laskar, e co-autore è Oleg E. Shklyaev, entrambi associati post-dottorato.
In vista di questo lavoro, Il Dr. Balazs et al hanno utilizzato la modellazione computazionale per progettare fogli chimicamente attivi che fossero in grado di avvolgere, sbattere e strisciare in una microcamera piena di liquido, sfruttando il potenziale per creare robot flessibili o "morbidi" per ambienti fluidi. Per l'articolo PNAS, i ricercatori hanno progettato sistemi fluidici che modellano i fogli rivestiti di catalizzatore in una forma simile a un granchio con quattro "artigli, " creando il predatore che può "cacciare" chimicamente la sua preda particellare.
"Mentre sviluppiamo la robotica futura e i dispositivi intelligenti, è importante comprendere i limiti dell'imitazione delle funzioni biologiche nelle macchine create dall'uomo. È anche fondamentale capire se i sistemi artificiali possono collaborare o competere per le risorse, " ha spiegato il dottor Balazs. "Se siamo in grado di replicare questa interdipendenza, possiamo aiutare a stabilire le basi affinché i robot o altri dispositivi lavorino insieme verso un obiettivo comune".
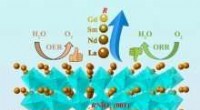
Per influenzare questo comportamento, Balazs ei suoi collaboratori hanno utilizzato il catalizzatore sui fogli per convertire i reagenti in prodotti all'interno di una microcamera. Questa reazione crea variazioni nella composizione chimica e nella densità del fluido, che trasformano i fogli bidimensionali in "granchi" 3D e spingono sia i granchi che le particelle nel fluido. Poiché i granchi generano gradienti chimici in un'area, le particelle rispondono tentando di "fuggire" da questa zona, formando un sistema altamente interdipendente.
Questa interdipendenza ha avuto un impatto anche sull'ambiente quando un secondo granchio è stato aggiunto al fluido:una volta introdotto il reagente, i due granchi imitavano la cooperazione per "condividere" le particelle. Però, se fosse introdotto un granchio più grande, competerebbe con le forme più piccole per catturare tutte le particelle per sé.
"In alcuni casi, il granchio grande non riesce a catturare le piccole particelle, ma quando aggiungiamo più granchi sembrano collaborare come un branco di lupi, "Spiega il dottor Shklyaev. "Allo stesso modo, quando un predatore ancora più grande entra nella microcamera, la "fame" che genera con una superficie catalitica più ampia dominerà il comportamento dei fogli predatori più piccoli".
Il Dr. Laskar afferma che la semplicità di questo sistema è che l'unica programmazione coinvolta è l'introduzione del reagente chimico nel sistema.
"Una volta aggiunto un reagente nella microcamera, tutti i comportamenti biomimetici si sono verificati spontaneamente, " ha detto. "Possiamo quindi adattare la misura in cui le particelle rispondono ai gradienti chimici, perché particelle diverse risponderanno in modi diversi. Quindi cambiare la proprietà anche di un solo tipo di oggetto altera l'interdipendenza dell'intero sistema."
Secondo il dottor Balazs, le nuove scoperte indicano la capacità di controllare l'attività all'interno della microcamera nello spazio e nel tempo, consentendo così ai fogli di rispondere a comandi diversi solo cambiando i reagenti aggiunti alla soluzione.
"I nostri calcoli rivelano la capacità di dirigere oggetti microscopici per eseguire funzioni specifiche, come trasportare celle o costruire strutture complesse, " ha detto. "Queste regole di progettazione hanno il potenziale per diversificare la funzionalità dei dispositivi microfluidici, consentendo loro di svolgere compiti significativamente più complessi."