Dentro le nostre cellule, e quelli delle forme di vita più note, esiste una varietà di composti complessi noti come "motori molecolari". Queste macchine biologiche sono essenziali per vari tipi di movimento nei sistemi viventi, dal riarrangiamento microscopico o trasporto di proteine all'interno di una singola cellula alla contrazione macroscopica dei tessuti muscolari. Al crocevia tra robotica e nanotecnologia, un obiettivo molto ricercato è trovare modi per sfruttare l'azione di questi minuscoli motori molecolari per eseguire compiti più importanti in modo controllabile. Però, raggiungere questo obiettivo sarà sicuramente impegnativo.
"Finora, anche se i ricercatori hanno trovato modi per aumentare l'azione collettiva delle reti motorie molecolari per mostrare la contrazione macroscopica, è ancora difficile integrare tali reti in modo efficiente nelle macchine reali e generare forze abbastanza grandi da azionare componenti su macroscala, " spiega il Professore Associato Yuichi Hiratsuka del Japan Advanced Institute of Science and Technology, Giappone.
Fortunatamente, Dottor Hiratsuka, in collaborazione con il Professore Associato Takahiro Nitta dell'Università di Gifu e il Professor Keisuke Morishima dell'Università di Osaka, sia in Giappone, hanno recentemente compiuto notevoli progressi nella ricerca di collegare il micro con il macro. Nel loro ultimo studio pubblicato su Materiali della natura , questo gruppo di ricerca ha riportato la progettazione di un nuovo tipo di attuatore azionato da due motori biomolecolari geneticamente modificati. Uno degli aspetti più interessanti del loro approccio di ispirazione biologica è che l'attuatore si autoassembla dalle proteine di base per semplice irraggiamento luminoso. In pochi secondi dopo che la luce colpisce una determinata area, le proteine motorie circostanti si fondono con proteine simili a rotaie chiamate microtubuli e si dispongono in una struttura macroscopica gerarchica che ricorda le fibre muscolari.
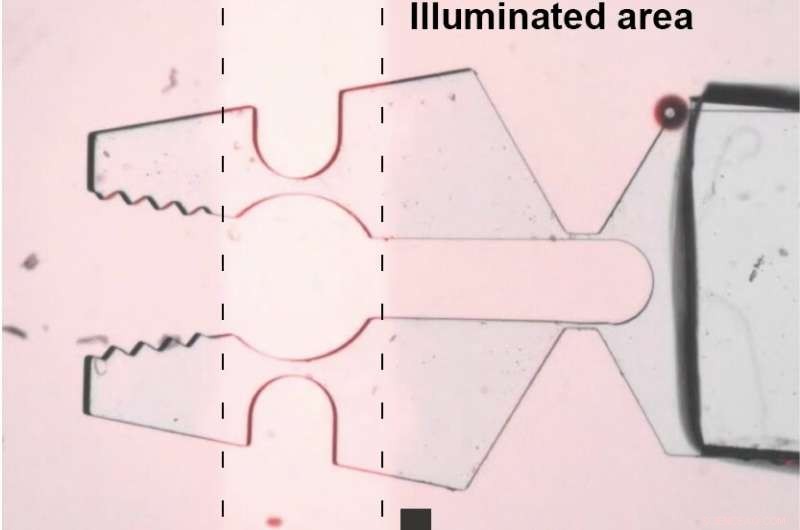
Dopo la formazione intorno alla zona bersaglio (illuminata), questo "muscolo artificiale" si contrae immediatamente, e la forza collettiva delle singole proteine motorie viene amplificata da una scala molecolare a una millimetrica. Come gli scienziati hanno dimostrato sperimentalmente, il loro approccio potrebbe essere ideale per applicazioni di robotica su piccola scala, come l'azionamento di pinze microscopiche per maneggiare campioni biologici (Figura 1). Altre applicazioni su scala millimetrica dimostrate includono anche l'unione di componenti separati, come ruote dentate in miniatura, e alimentando bracci robotici minimalisti per creare un microrobot strisciante simile a un insetto.
La cosa davvero notevole di questa tecnica è che è compatibile con le tecniche di stampa 3D esistenti che utilizzano la luce, come la stereolitografia. In altre parole, i microrobot con muscoli artificiali incorporati possono essere stampabili in 3D, consentendo la loro produzione di massa e quindi aumentando la loro applicabilità per risolvere vari problemi. "Nel futuro, il nostro attuatore stampabile potrebbe diventare il tanto necessario "inchiostro dell'attuatore" per la stampa 3D senza soluzione di continuità di interi robot. Riteniamo che un tale inchiostro a base di biomolecole possa spingere in avanti la frontiera della robotica consentendo la stampa di componenti ossei e muscolari complessi necessari affinché i robot assomiglino ulteriormente a creature viventi, " dice il dottor Hiratsuka.
Un potenziale miglioramento della tecnica attuale sarebbe trovare modi per decontrarre in modo efficiente i muscoli artificiali (reversibilità). In alternativa, la strategia attuale potrebbe anche essere modificata in modo da produrre un comportamento oscillatorio spontaneo invece di contrazione, come si osserva nelle ciglia mobili dei microbi o nei muscoli del volo degli insetti.
In ogni caso, questo studio mostra efficacemente come imitare le strategie che la natura ha escogitato sia spesso una ricetta per il successo, come molti scienziati nel campo della robotica hanno già capito.