Un famoso video virale sulla DARPA Robotics Challenge mostra tutti i tipi di robot umanoidi che cadono goffamente. Il movimento bipede è piuttosto instabile, che non è solo un problema per un robot che cerca di completare il suo compito, ma anche perché cadere può danneggiare un macchinario molto costoso.
I robot di tutto il mondo stanno affrontando questo problema in una miriade di modi. Mentre alcuni cercano di aggiungere una serie di passaggi correttivi dopo che un robot diventa sbilanciato, proprio come una persona che inciampa dopo essere inciampata, Kris Hauser vuole che i robot siano in grado di utilizzare l'ambiente che li circonda.
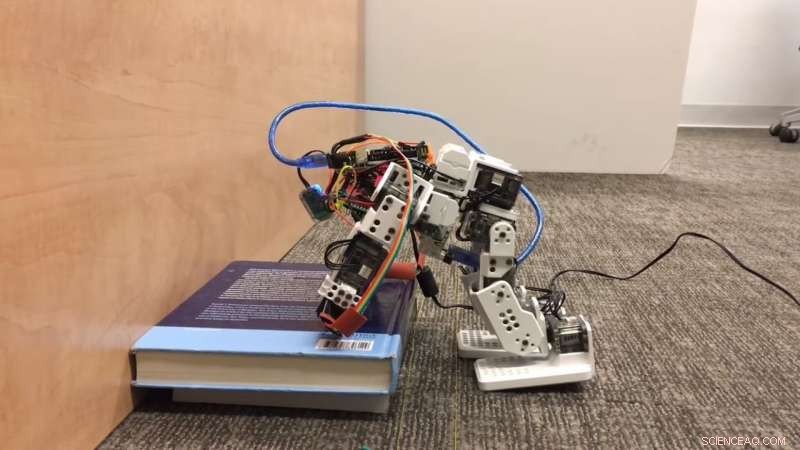
"Se una persona viene spinta verso un muro o una ringhiera, potranno usare quella superficie per tenersi in piedi con le mani. Vogliamo che i robot siano in grado di fare la stessa cosa, "ha detto Kris Hauser, professore associato di ingegneria elettrica e informatica e di ingegneria meccanica e scienza dei materiali alla Duke. "Crediamo di essere l'unico gruppo di ricerca che lavora per far sì che un robot scelga in modo dinamico dove mettere le mani per evitare di cadere".
Sebbene tali decisioni e azioni siano per noi una seconda natura, programmarli nei riflessi di un robot è ingannevolmente difficile. Per semplificare il processo e risparmiare tempo di calcolo, Hauser programma il software in modo che si concentri solo sulle articolazioni dell'anca e della spalla del robot.
Finché il robot non si torce mentre cade, questo crea solo tre angoli che l'algoritmo di stabilizzazione deve prendere in considerazione:il piede verso l'anca, l'anca alla spalla, e la spalla alla mano. Il robot deve identificare le superfici vicine a portata di mano e quindi calcolare rapidamente la migliore combinazione di angoli per catturare se stesso. La soluzione finale riduce al minimo l'impatto quando le mani del robot entrano in contatto, e riduce anche la possibilità che le mani o i piedi scivolino. L'algoritmo prende la sua ipotesi migliore e poi la ottimizza progressivamente utilizzando un metodo chiamato tiro diretto.
Nel suo stato attuale, il robot riceve informazioni sul suo ambiente e non può navigare da solo. Ma in un prossimo futuro, Hauser prevede di passare a un robot più grande con i propri sensori della fotocamera per consentirgli di vedere l'ambiente circostante.
"Speriamo che entro la fine dell'anno dovremmo fare esperimenti con il robot che effettivamente lavora in un percorso a ostacoli dal vivo, "Hauser ha detto. "Allora cercheremo di fare in modo che il robot mappi dinamicamente ciò che lo circonda e ragioni su come proteggersi dalla caduta in ambienti arbitrari".