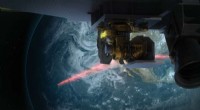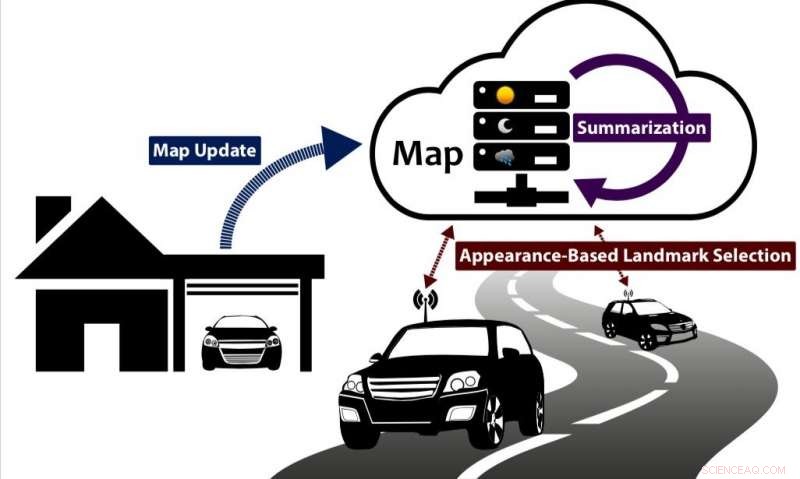
Una panoramica schematica del nostro sistema di localizzazione e mappatura visiva "completo". Credito:Burki et al.
I ricercatori dell'Autonomous Systems Lab dell'ETH di Zurigo hanno recentemente sviluppato un processo di gestione delle mappe per i sistemi di localizzazione visiva, specificamente progettato per operazioni in ambienti esterni che coinvolgono più veicoli. Il loro studio, presentato all'Intelligent Vehicles Symposium (IV) di quest'anno e disponibile su arXiv, affronta la sfida chiave di incorporare grandi quantità di dati di localizzazione visiva in una mappa visiva permanente, al fine di fornire costantemente una localizzazione efficace in tutte le condizioni estetiche.
"L'autolocalizzazione è fondamentale per qualsiasi tipo di robot mobile, compresi i veicoli autonomi, "Mathias Burki, uno dei ricercatori che ha condotto lo studio, ha detto a Tech Xplore. "Mentre la maggior parte dei veicoli di ricerca autonomi è dotata di sensori 3D LiDAR, questi sono ancora costosi, e la loro idoneità per la futura produzione di massa è quindi discutibile. D'altra parte, i sensori della fotocamera sono molto economici, e si sono già fatti strada nelle attuali flotte automobilistiche (ad esempio per i sistemi di assistenza al parcheggio). Perciò, abbiamo studiato il potenziale dell'utilizzo delle telecamere come sensore principale per la localizzazione precisa dei veicoli autonomi".
Una delle principali sfide incontrate durante lo sviluppo di sistemi di localizzazione visiva per ambienti esterni è garantire che questi sistemi affrontino bene i cambiamenti di aspetto. Questi includono sia i cambiamenti che si verificano a breve termine (ad es. ombre, ecc.) e a lungo termine (es. cambi stagionali, fogliame, eccetera.).
Ricerche precedenti hanno scoperto che le mappe create per la localizzazione visiva potrebbero teoricamente essere adattate per funzionare in condizioni di aspetto esterno variabili. Ciò nonostante, adattare queste mappe può essere molto costoso, richiedendo ingenti risorse spese sui server che mantengono le mappe e sugli stessi veicoli autonomi. Sebbene esistano una serie di soluzioni che potrebbero aiutare a ridurre i costi e ad affrontare la complessità di questo problema, finora, questi sono stati studiati solo isolatamente.
"L'obiettivo della nostra recente ricerca era combinare diversi componenti e approcci che migliorano la scalabilità, come il riepilogo della mappa offline, e selezione dei punti di riferimento online basata sull'aspetto, al fine di costruire un sistema di localizzazione e mappatura completamente scalabile ed efficiente in termini di risorse, " Spiega Bürki. "Volevamo anche indagare in dettaglio come funziona questo sistema nel mondo reale, condizioni a lungo termine, quanto tempo impiega le mappe visive a convergere verso uno stato stabile, quanto bene i diversi componenti che si occupano di scalabilità lavorano insieme, e se uno interferisce con l'altro in modo indesiderato."
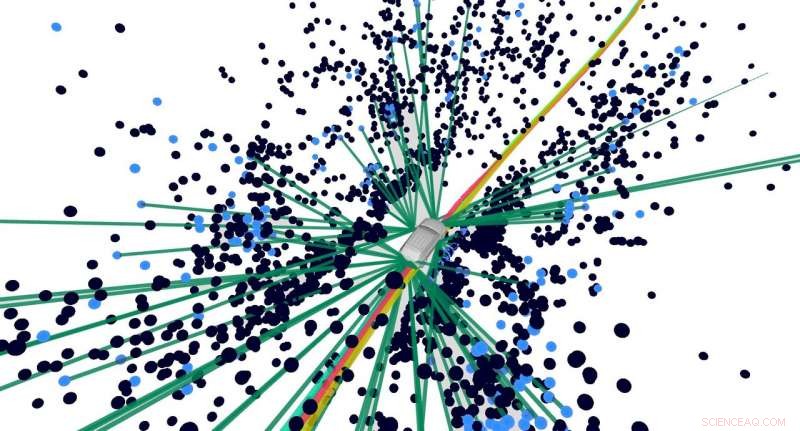
Uno screenshot dal sistema di localizzazione visiva dei ricercatori. Le sfere azzurre e scure indicano la posizione 3D dei punti di riferimento visivi utilizzati per la localizzazione. L'azzurro indica quelli che vengono selezionati dalla selezione del punto di riferimento basata sull'aspetto, mentre gli oscuri sono quelli che vengono scartati. Le linee verdastre indicano le corrispondenze tra le immagini della telecamera dal vivo nell'auto (dalla parte anteriore, sinistra-, telecamera posteriore e destra), e i punti di riferimento 3D nella mappa. Attraverso queste partite, la posizione (posizione, orientamento) della vettura è dedotto. Le spesse linee colorate illustrano le traiettorie in cui l'auto stava guidando durante la registrazione dei dataset che sono stati utilizzati per costruire la mappa multisessione. Credito:Burki et al.
Il processo di gestione delle mappe sviluppato da Bürki e dai suoi colleghi funziona aggiungendo nuovi set di dati alla mappa nel tempo, aggiornandolo continuamente per far fronte al meglio alle nuove condizioni estetiche. Ogni volta che un nuovo set di dati viene aggiunto alla mappa, una successiva fase di riepilogo della mappa garantisce che la sua dimensione non superi un certo limite.
"Se il nuovo set di dati è stato registrato in condizioni di aspetto che sono già ben coperte dalla mappa, il set di dati non viene aggiunto alla mappa, ma le statistiche sulle osservazioni dei punti di riferimento sono migliorate, che in cambio rende più efficiente la selezione dei punti di riferimento basata sull'aspetto nelle sortite future, " spiega Burki.
I ricercatori hanno testato il nuovo processo di gestione delle mappe nel mondo reale in condizioni esterne difficili. I risultati delle loro valutazioni sono stati molto promettenti, suggerendo che il loro meccanismo di gestione delle mappe leggero potrebbe aiutare a sviluppare sistemi di localizzazione visiva per veicoli autonomi che funzionano bene in diverse condizioni di aspetto, ma anche prestazioni migliori nella selezione dei punti di riferimento.
"La nostra scoperta più significativa è stata che è davvero possibile e praticamente fattibile costruire un tale sistema di localizzazione e mappatura visiva che a) sia, e rimane efficiente, b) è, e rimane scalabile, e c) fornisce una localizzazione accurata in ambienti esterni a lungo termine, " Bürki ha detto. "Un'altra scoperta è stata che la selezione dei punti di riferimento basata sull'aspetto online e il riepilogo delle mappe offline funzionano bene insieme e si completano a vicenda".
In futuro, i veicoli autonomi più performanti saranno molto probabilmente dotati di sensori 3D LiDAR, poiché questi appaiono attualmente essenziali per garantire la sicurezza e far sì che il veicolo percepisca efficacemente gli ostacoli nell'ambiente circostante, compresi i pedoni. Recentemente, il costo di questi sensori è diminuito notevolmente, che potrebbe anche facilitare la loro adozione diffusa negli anni a venire.
"Ora concentreremo maggiormente la nostra ricerca sulla questione di come i sensori LiDAR possono essere utilizzati per supportare la localizzazione visiva, " ha detto Bürki. "Soprattutto in condizioni di scarsa illuminazione, le telecamere raggiungono inevitabilmente i loro limiti, mentre i LiDAR sono adatti anche in condizioni di oscurità."
© 2018 Tech Xplore