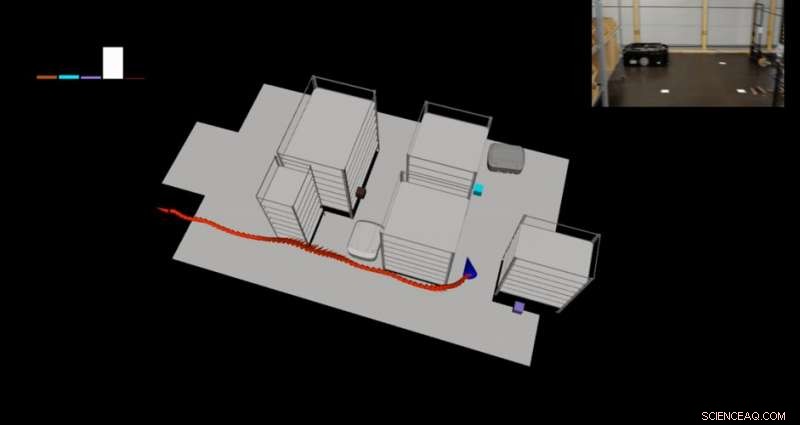
La traiettoria del lavoratore umano nell'area di prova del magazzino. I dati sulla posizione sono forniti dall'algoritmo di localizzazione di Hololens. In alto a destra si può vedere la visuale in prima persona del lavoratore. In alto a sinistra ci sono le probabilità che il lavoratore raggiunga un obiettivo specifico. Credito:Petkovic et al.
La rapida crescita delle attività di logistica ha generato la necessità di sistemi di magazzino più evoluti ed efficienti. I progressi nella robotica potrebbero aiutare a soddisfare queste esigenze automatizzando le attività che sono attualmente completate dagli esseri umani, velocizzando notevolmente il flusso di lavoro.
Per operare in modo sicuro ed efficiente, però, Gli assistenti di magazzino robot dovrebbero essere in grado di riconoscere le intenzioni dei loro operatori umani. I ricercatori dell'Università di Zagabria e del Karlsruhe Institute of Technology hanno recentemente sviluppato un algoritmo di stima dell'intenzione umana basato sui principi della teoria della mente (ToM). ToM è la capacità umana di riconoscere l'intento, credenze, desideri, emozioni, e stati mentali in altri esseri umani.
"La nostra ricerca è nata dal progetto dell'UE Horizon 2020 SafeLog, che mira a consentire l'ingresso in sicurezza delle persone in magazzini completamente automatizzati, dove i robot mobili trasportano le rastrelliere, senza spegnere l'intera flotta di robot, "Davide Puljiz, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Questo viene fatto attraverso l'uso di un giubbotto di sicurezza appositamente progettato e un dispositivo AR per guidare e aiutare il lavoratore a navigare in questo ambiente".
Per aumentare la sicurezza, il sistema di sicurezza del magazzino ideato dai ricercatori pianifica il percorso di un robot in modo che non si scontri con quello dei lavoratori umani. Perché funzioni, ha bisogno di sapere dove sta andando l'operatore umano, in particolare se non si sta dirigendo verso un luogo precedentemente concordato.
Puljiz e i suoi colleghi hanno osservato il movimento dei singoli lavoratori umani negli ambienti di magazzino e li hanno convalidati rispetto alle posizioni degli obiettivi, utilizzando un approccio chiamato pianificazione generalizzata basata sul diagramma di Voronoi. Queste osservazioni sono state poi alimentate a un modello di Markov nascosto, che può stimare le intenzioni di un lavoratore online mentre naviga in ambienti mutevoli.
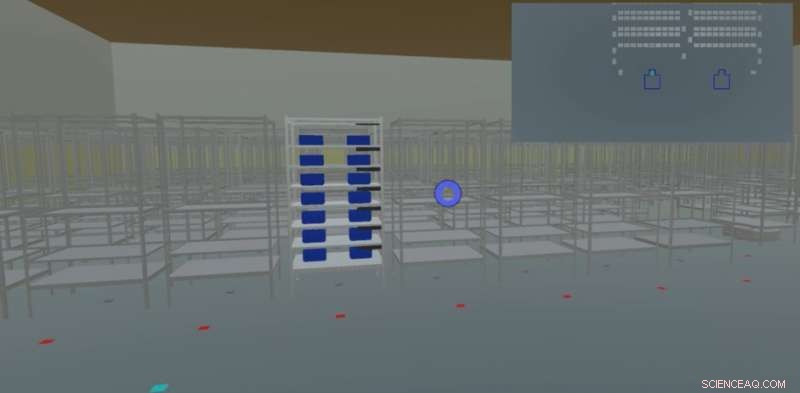
La visuale in prima persona nell'ambiente VR, utilizzato per testare l'algoritmo in scenari su larga scala. In alto a sinistra è possibile vedere una vista dall'alto dell'area intorno al lavoratore, compresi i robot mobili. Credito:Puljiz et al.
"L'algoritmo di stima dell'intenzione umana basato su ToM proposto per magazzini robotizzati flessibili si basa sulla convalida del movimento del modello Markov nascosto, "Tomislav Petkovic, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Osserviamo il movimento del lavoratore e lo convalidiamo rispetto alle posizioni degli obiettivi utilizzando la pianificazione del percorso basata sul diagramma di Voronoi generalizzato. Queste osservazioni vengono quindi elaborate dal framework del modello Markov nascosto, che stima le intenzioni dei lavoratori online ed è in grado di gestire ambienti mutevoli. Il laboratorio LAMOR dell'Università di Zagabria ha sviluppato il backend dell'algoritmo:validazione del movimento e stima degli obiettivi."
Per valutare l'efficacia del modello, IPR Lab presso il Karlsruhe Institute of Technology ha condotto esperimenti di stima dell'intenzione in un piccolo ambiente di test di magazzino, utilizzando gli occhiali AR Microsoft Hololens. I ricercatori hanno effettuato ulteriori valutazioni in magazzini virtuali su larga scala, utilizzando la tecnologia VR. Hanno scoperto che la loro struttura potrebbe stimare efficacemente le intenzioni dei magazzinieri, con notevole precisione.
"Penso che l'aspetto più significativo del nostro studio sia che i dispositivi AR possono essere utilizzati per qualcosa di più dell'intrattenimento o del marketing e possono effettivamente essere utili in ambienti industriali, " Puljiz ha detto. "Il campo di ricerca è piuttosto nuovo e ci sono molte possibilità in questo settore".
Nel futuro, l'algoritmo di stima dell'intenzione umana in tempo reale sviluppato da Puljiz e dai suoi colleghi potrebbe aumentare la sicurezza e l'efficienza dei sistemi robotici basati sul magazzino. Ad esempio, potrebbe aiutare lo sviluppo di robot più reattivi in grado di stimare le intenzioni degli operatori umani intorno a loro, adattando e pianificando di conseguenza i loro percorsi.
"Nel lavoro futuro, potremmo estendere l'algoritmo agli spazi 3D e seguire la direzione dello sguardo in 3D per determinare, Per esempio, se il lavoratore ha intenzione di prendere l'oggetto sbagliato o se è preoccupato per un robot che si avvicina, " ha detto Puljiz. "Ci sono molte altre possibilità, comprese le integrazioni per il tracciamento manuale."
© 2018 Science X Network